
模型预测控制在运动规划中的应用
Introduction
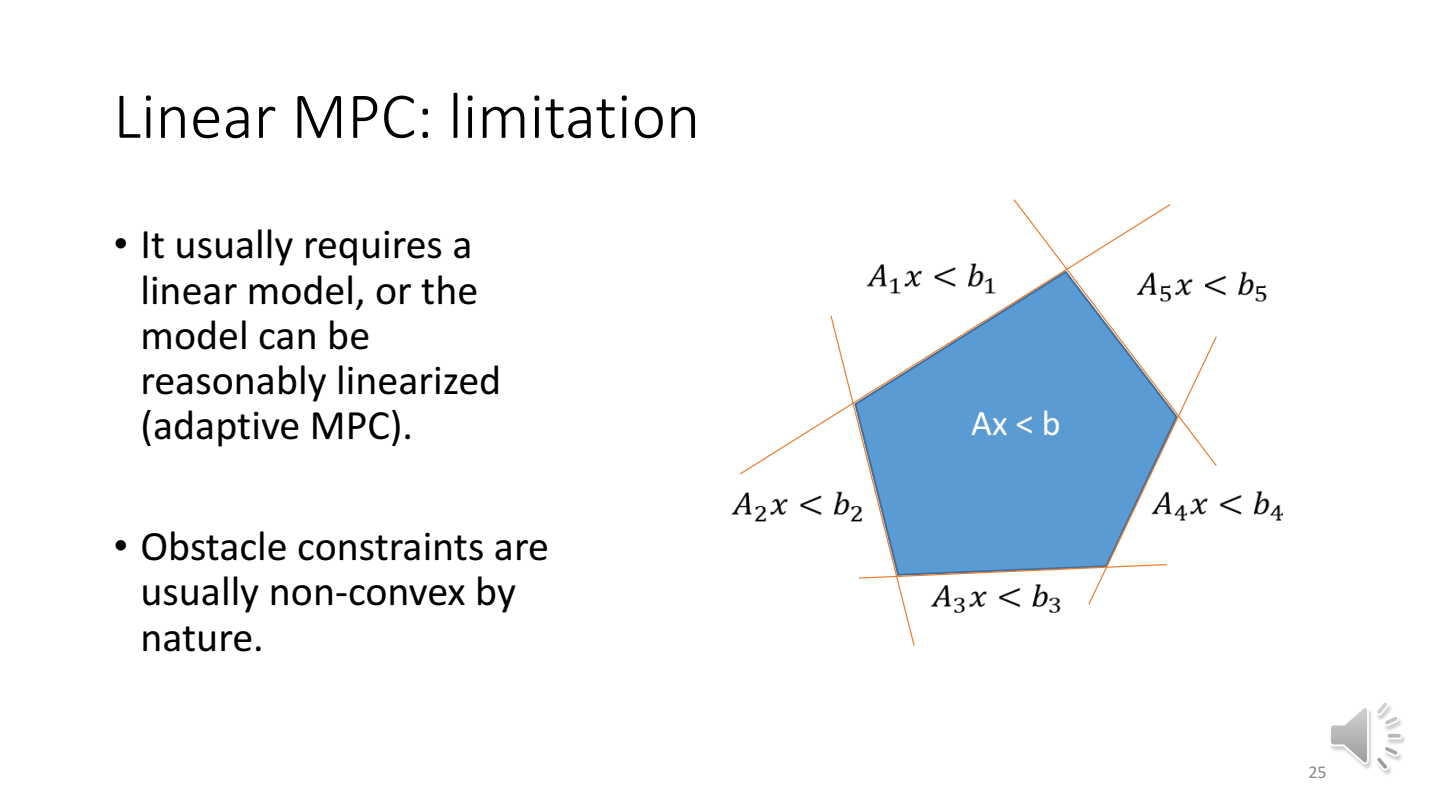
线性MPC解决的优化问题一般是凸的
非线性MPC解决的优化问题一般是非凸的
-
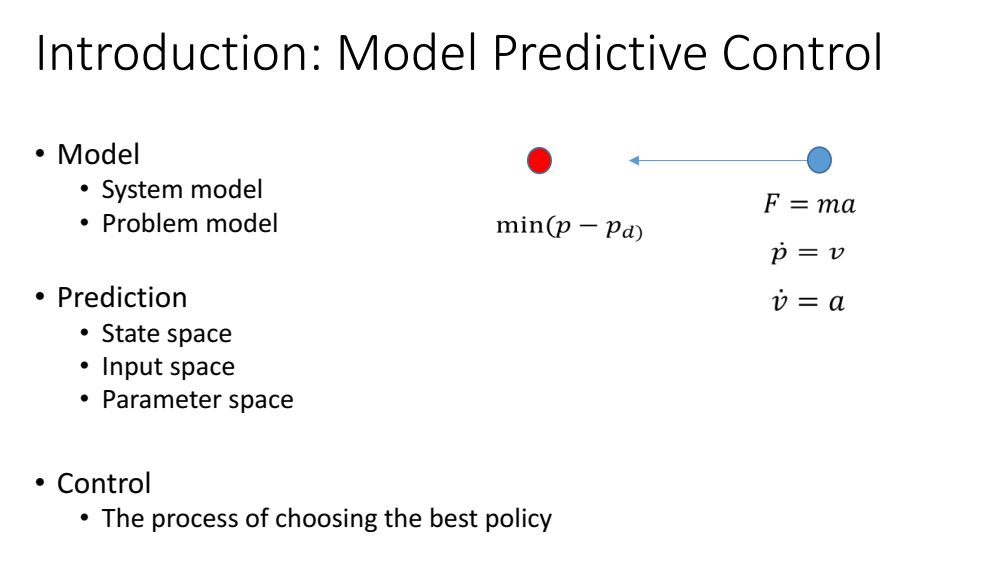
模型
- 系统模型(描述系统自身)
- 问题模型(描述优化目标)
-
预测
-
状态空间
-
输入空间
-
参数空间
-
-
控制(选择最优的输入或策略)
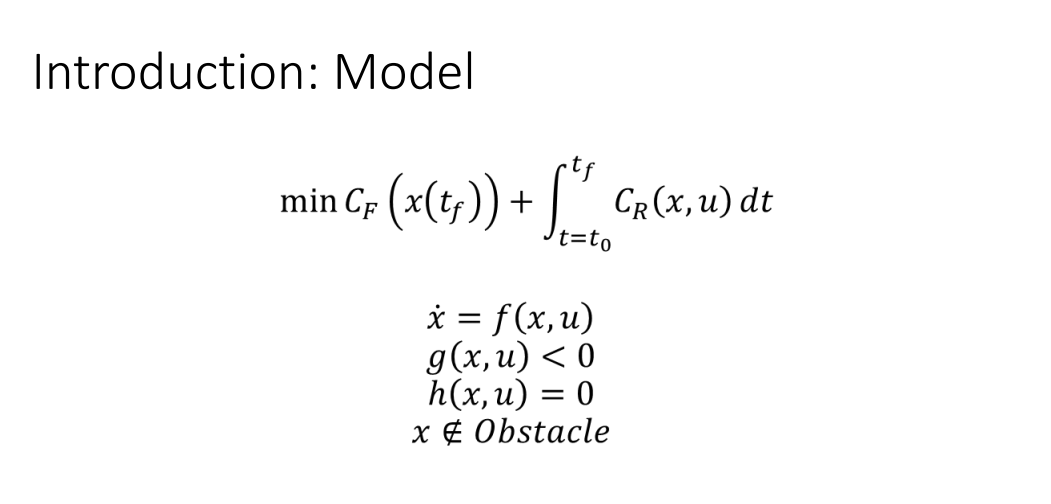
也相当于不等式约束,但由于该约束一般为非凸的,因此需要特殊处理
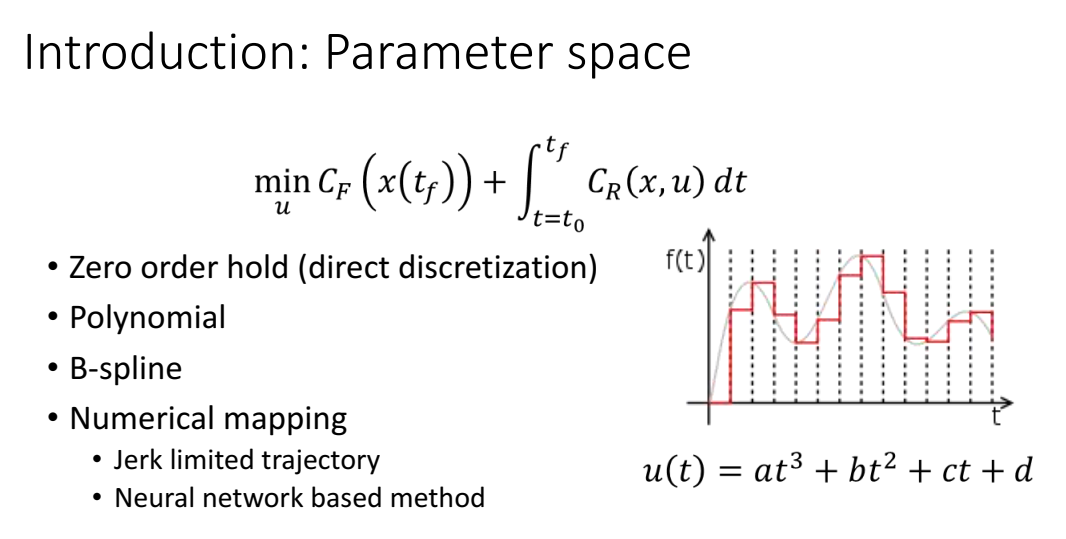
零阶保持器(离散)、多项式、B样条
数值映射的方法:Jerk limited trajectory、基于神经网络的方法
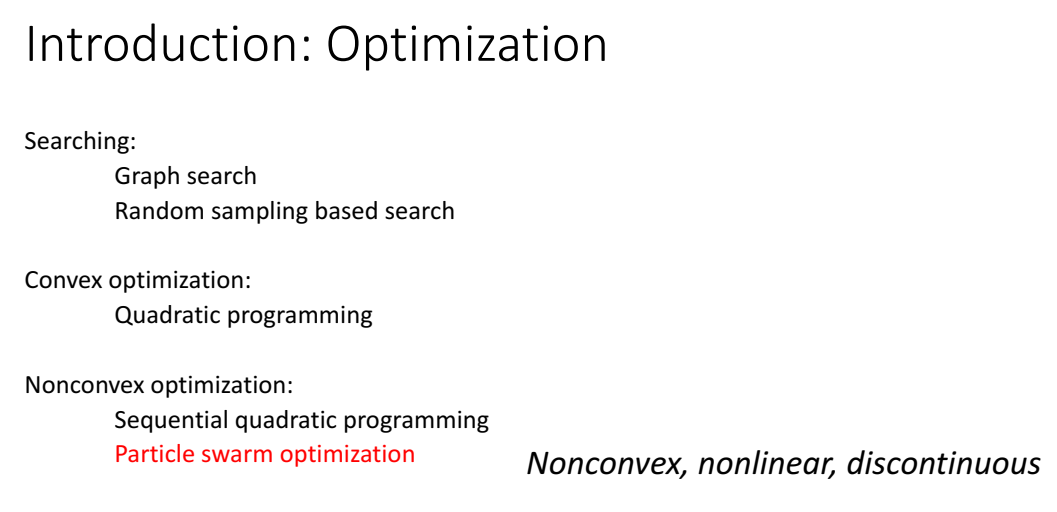
优化的方法:
- Searching
- Convex optimization
- Noconvex optimization
- 顺序二次规划
- 粒子群优化(适用于非凸、非线性、离散的情况)
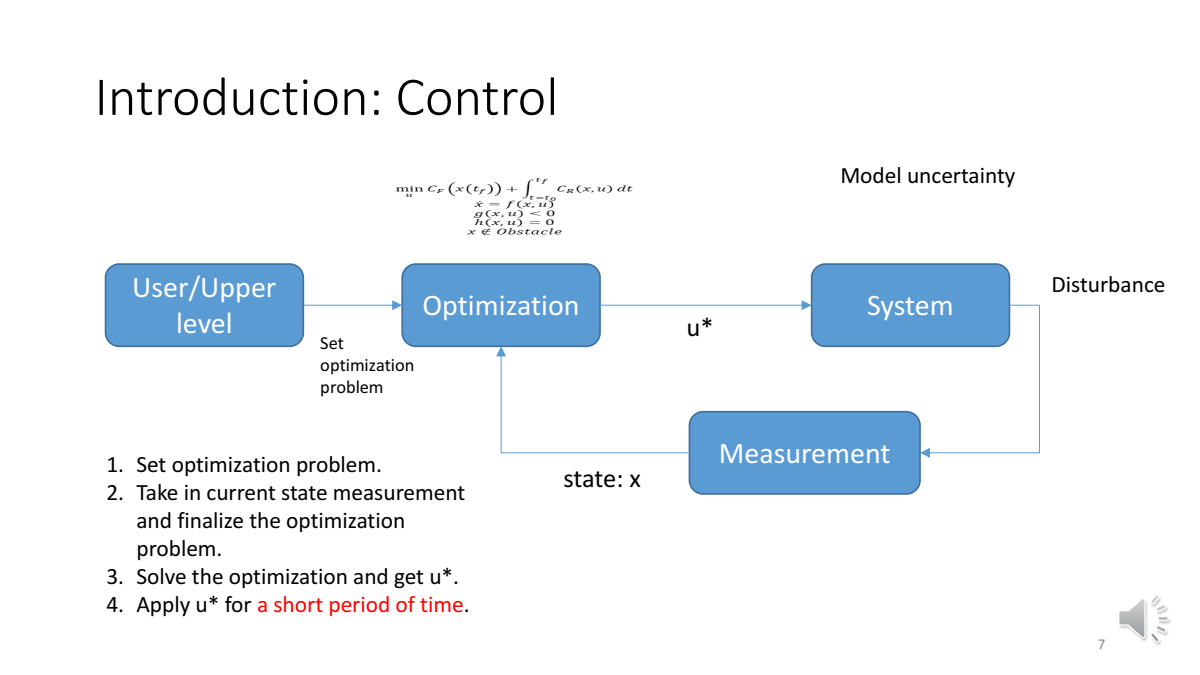
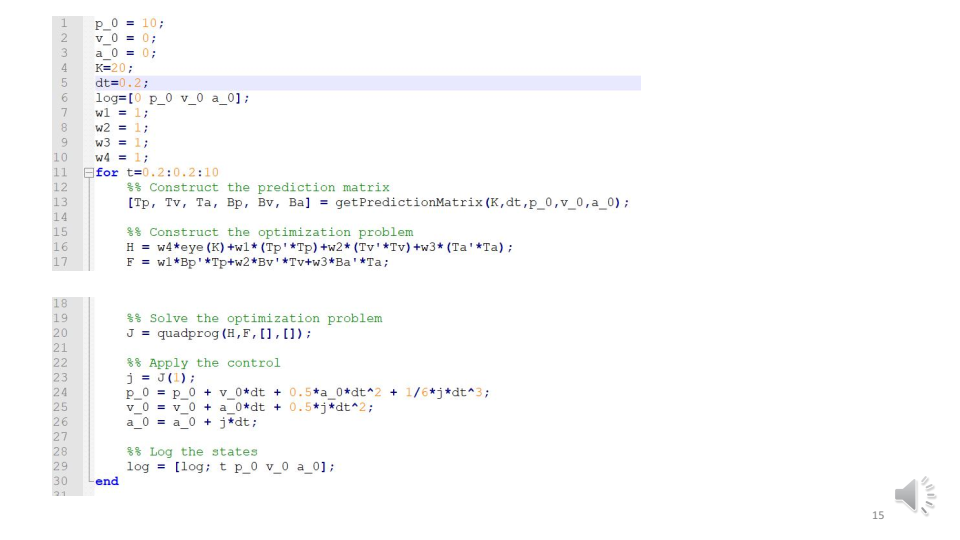
RHC(Receding Horizon Control),MPC的基础。
- 建立优化问题
- 获取当前的状态(作为优化问题的初始状态),确定优化问题
- 求解优化问题,得到
- 将直接用于短时间的状态控制
- 循环2—4步……
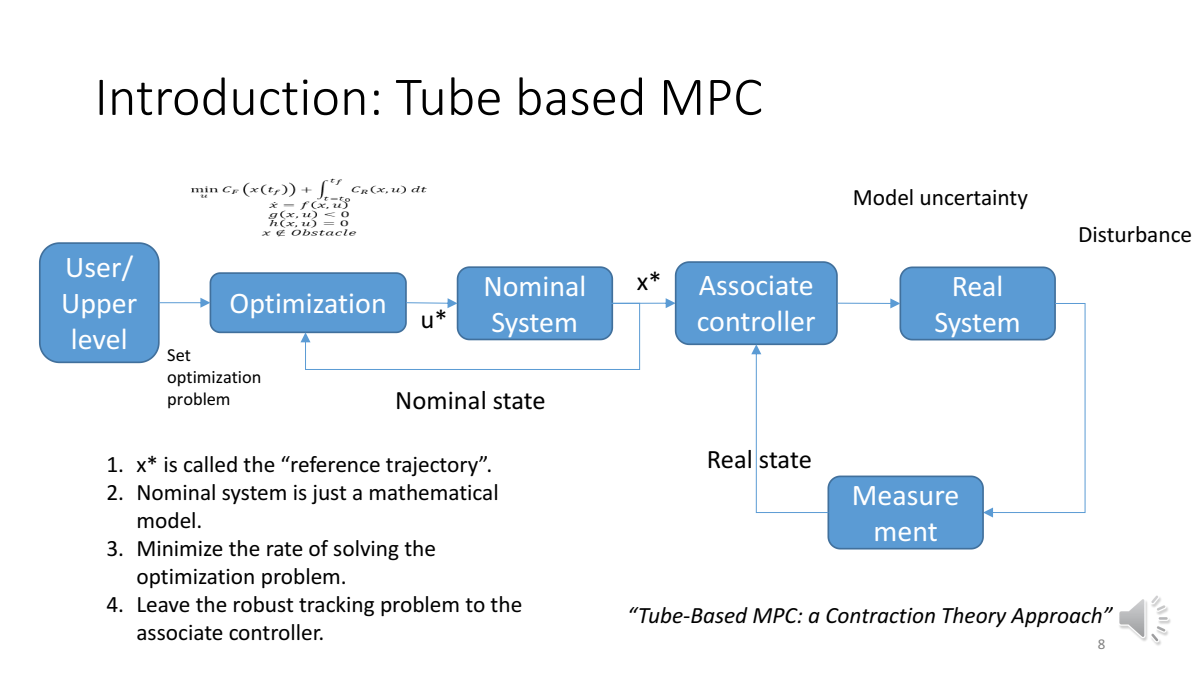
Tube based MPC相较于RHC新增了Nominal System(相当于用于输出参考轨迹)和Associate controller(相当于参考轨迹作为目标状态用于控制实际状态)
由于Nominal System只是数学模型,因此是理想的;跟踪的鲁棒性问题(Model uncertainty和Disturbance)全都由Associate controller决定
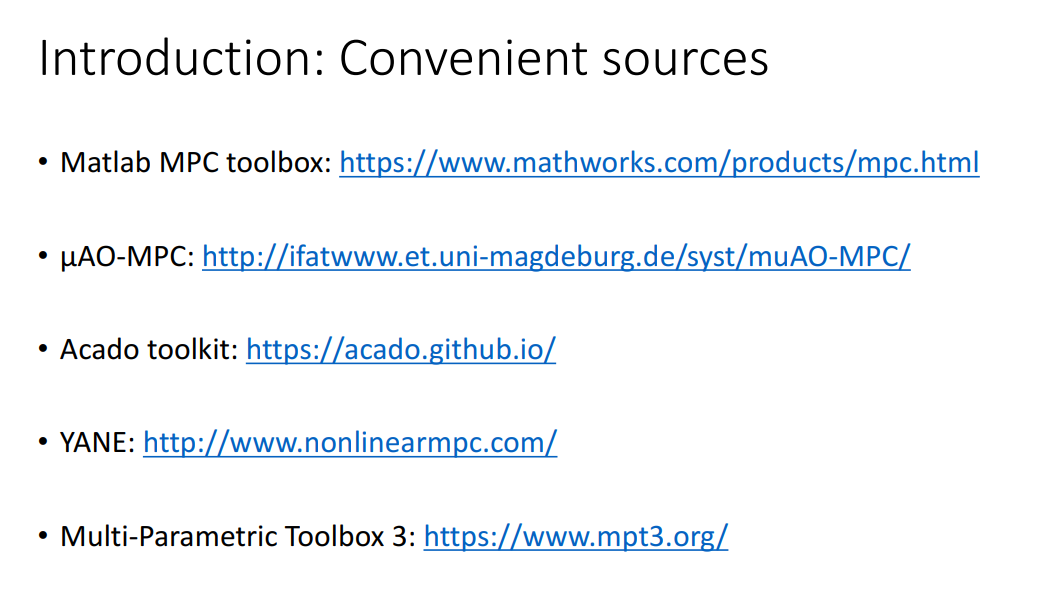
求解MPC的一些工具
Linear Model Predictive Control(MPC)
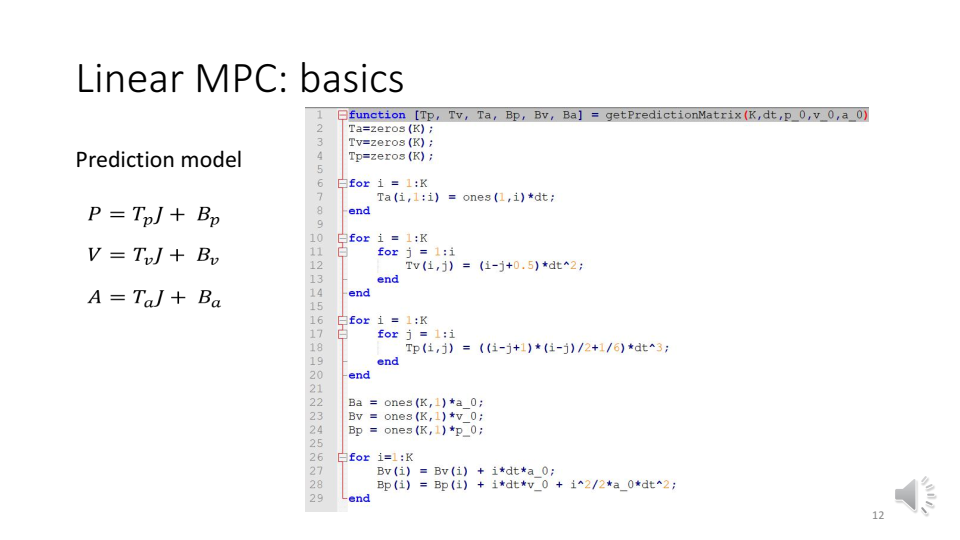
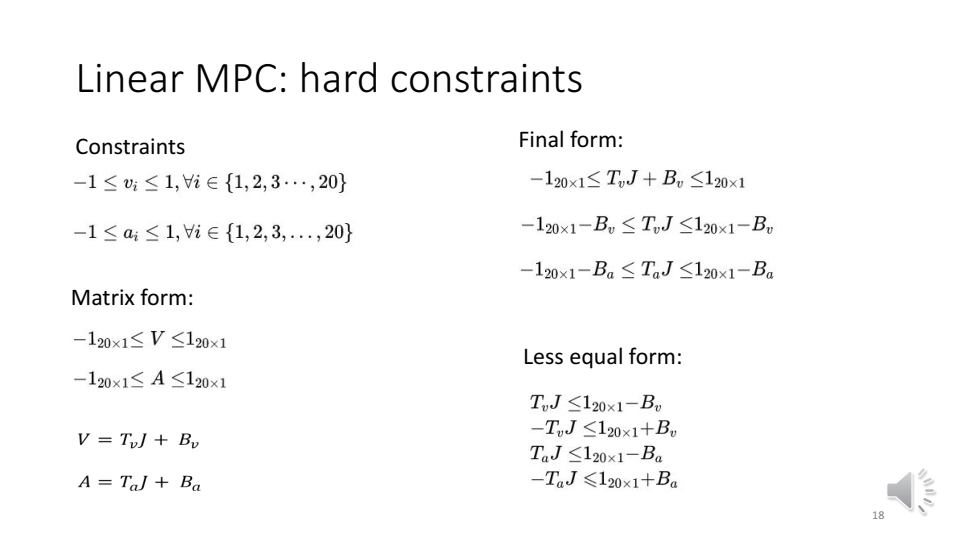
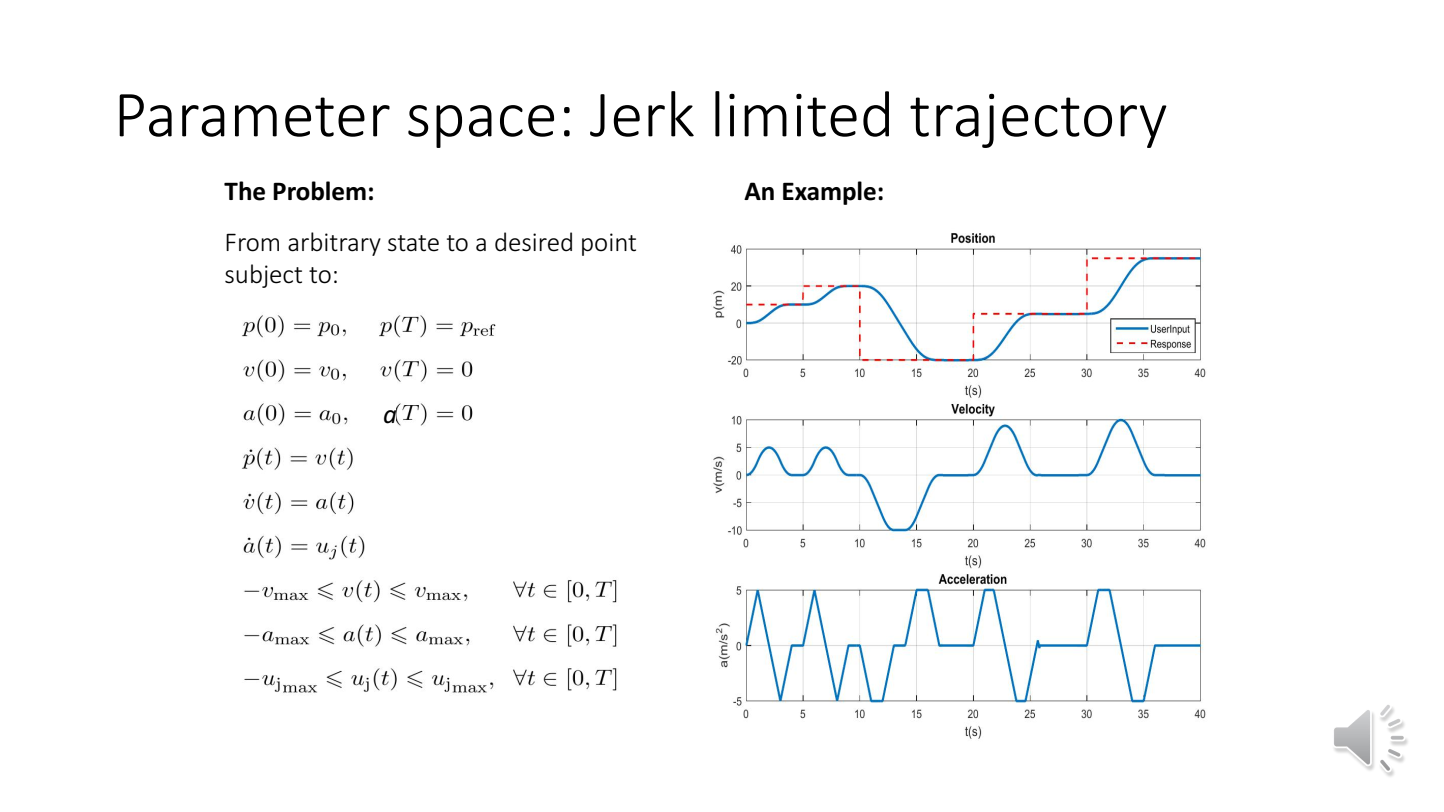
建立系统模型
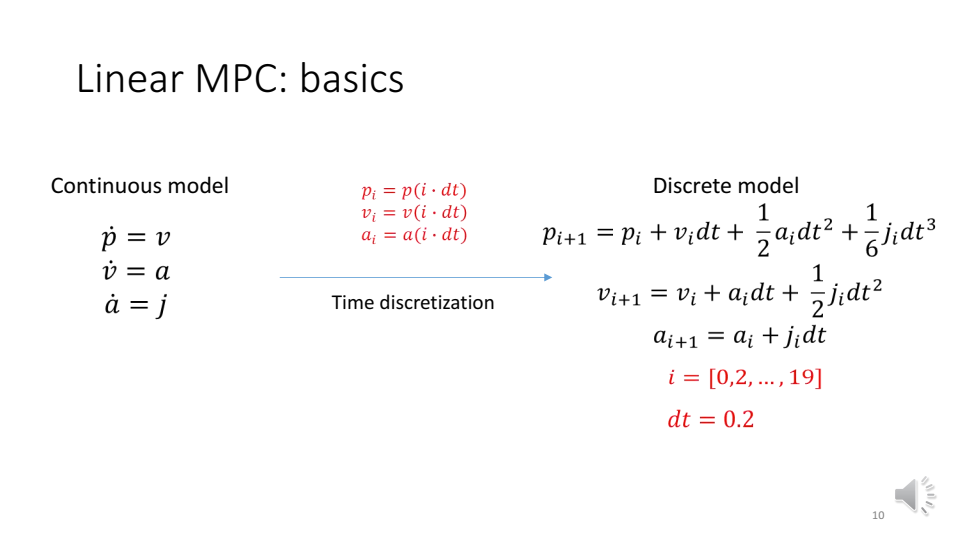
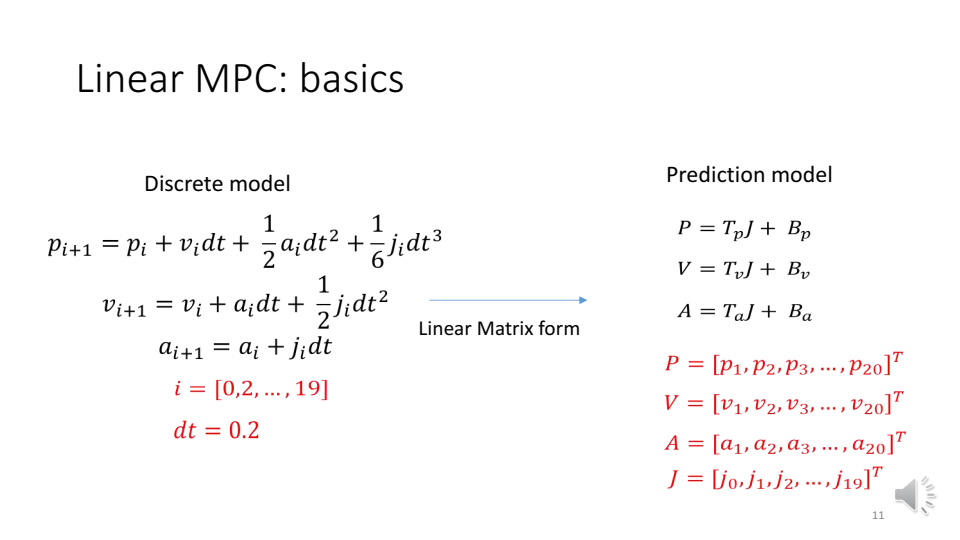
这里的控制量为jerk,4s内离散化为20份(通过离散,参数化J)。可以将离散的P、V、A表示为向量形式(并建立与向量J的关系)
这个表达式可以用离散状态转移方程推导得到
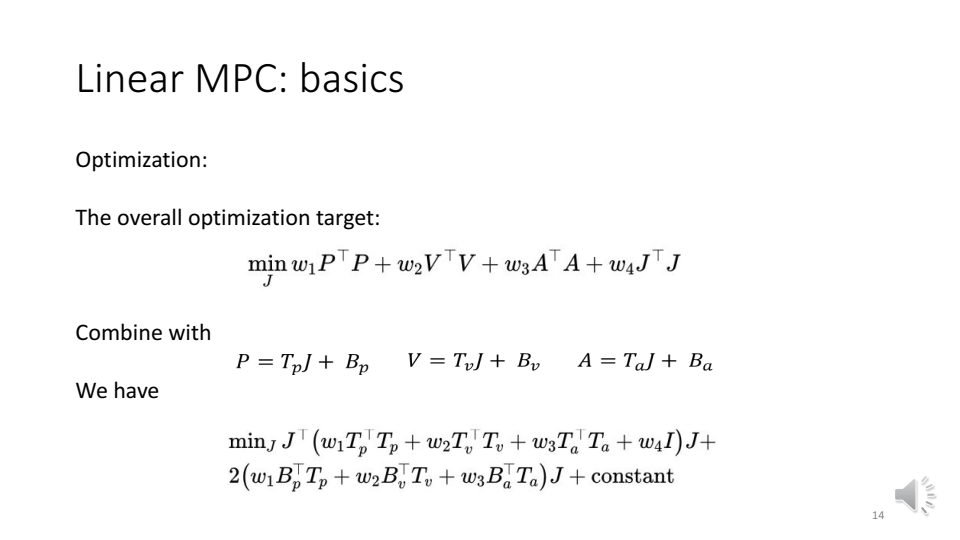
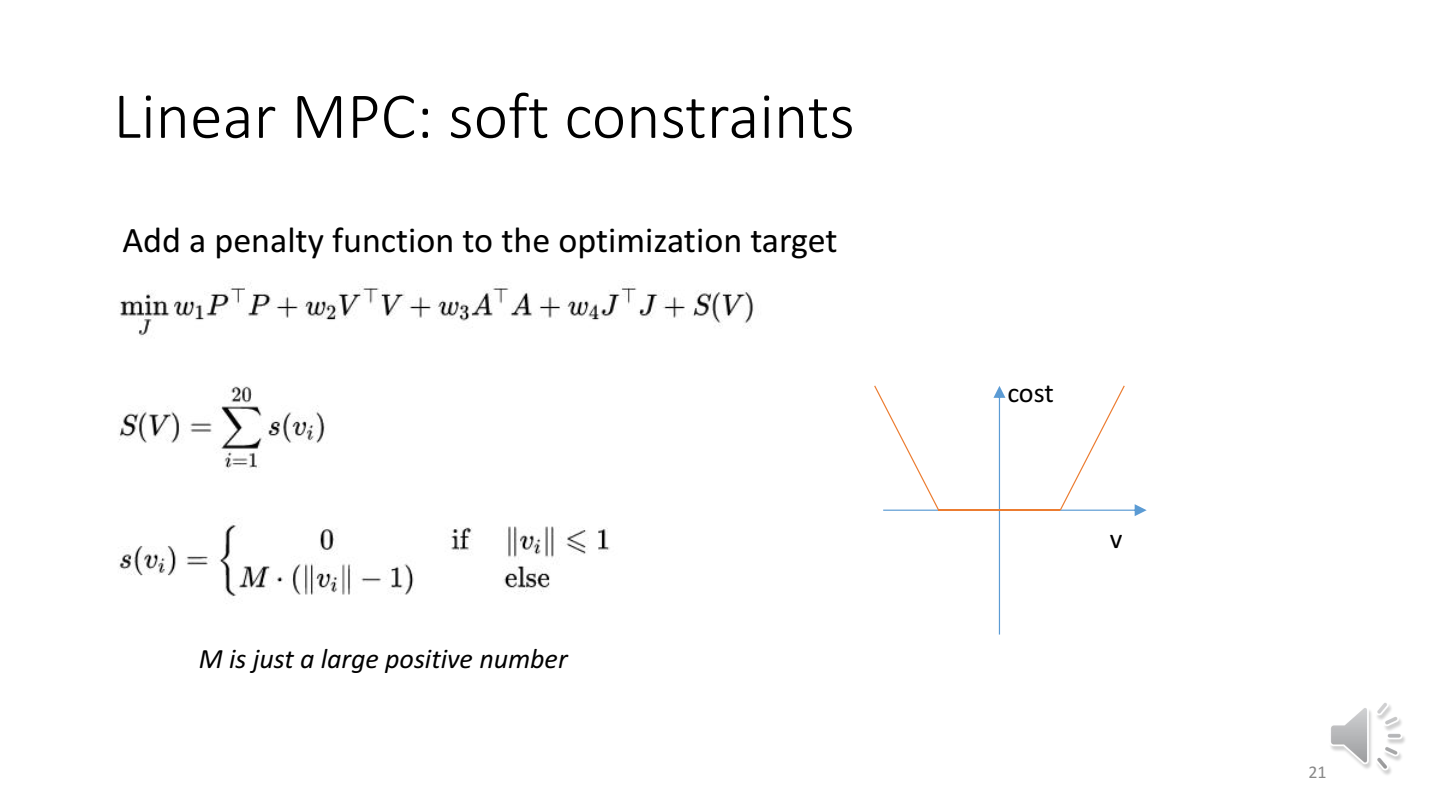
软约束——加入惩罚函数,优化问题数值求解(不在是二次规划问题)
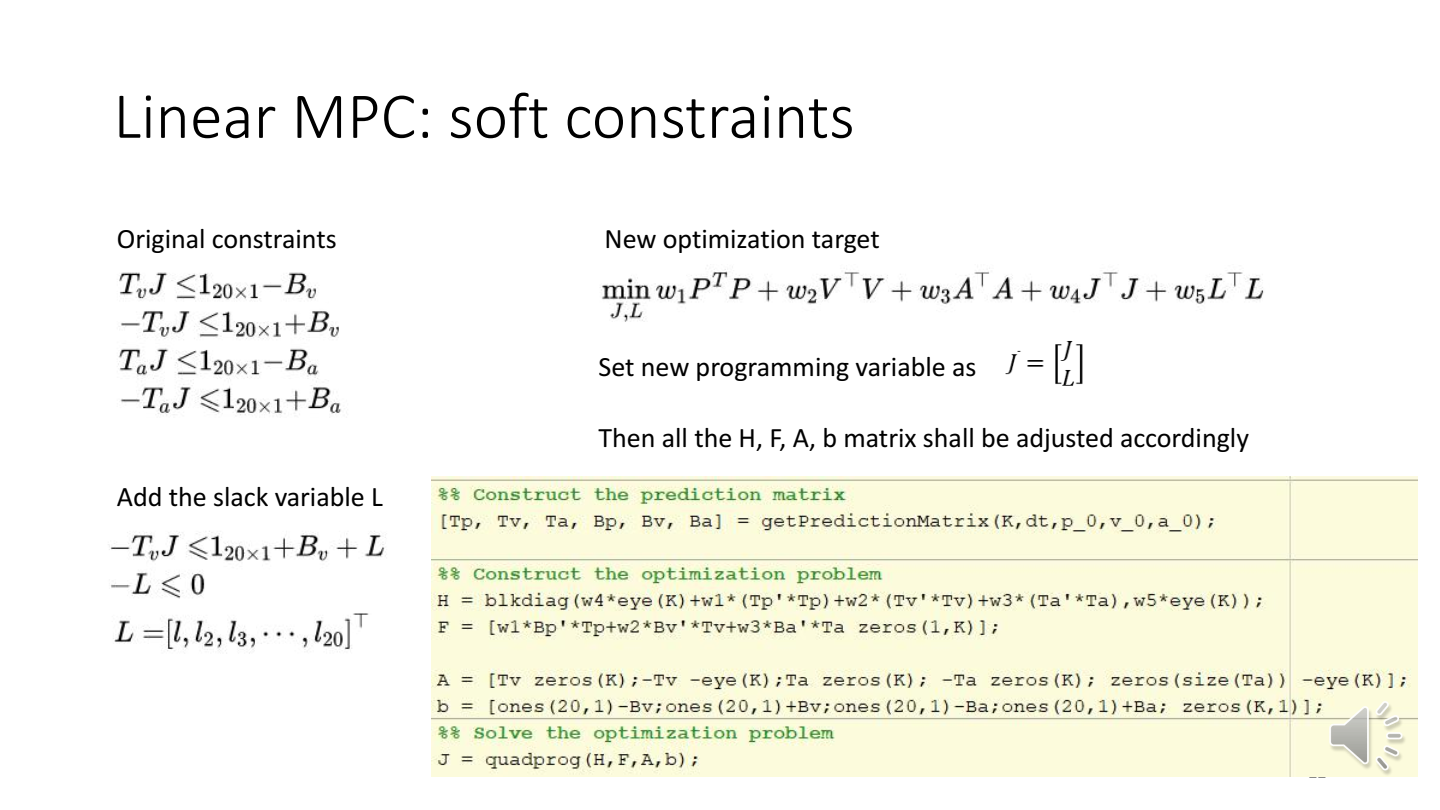
状态约束——一般使用软约束,状态一般受测量噪声和干扰的影响,故有可能超出预定范围
输入约束——一般使用硬约束
Non-linear MPC
Jerk Limited trajectory
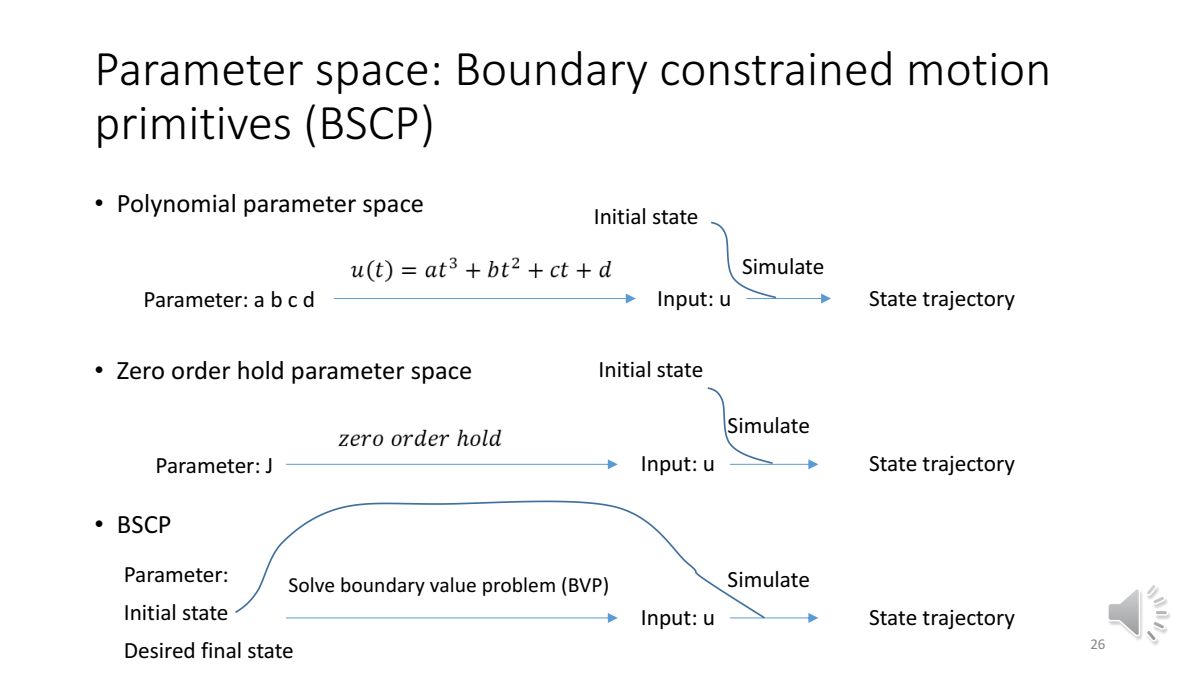
参数空间:多项式参数空间、零阶保持器参数空间、BSCP(Boundary constrained motion primitives)——参数:系统的初末状态,通过解一个BVP问题,得到输入(最后可以优化的参数相当于是系统的末状态)
BSCP中一种用得比较多的类型:JLT(Jerk Limited Trajectory)
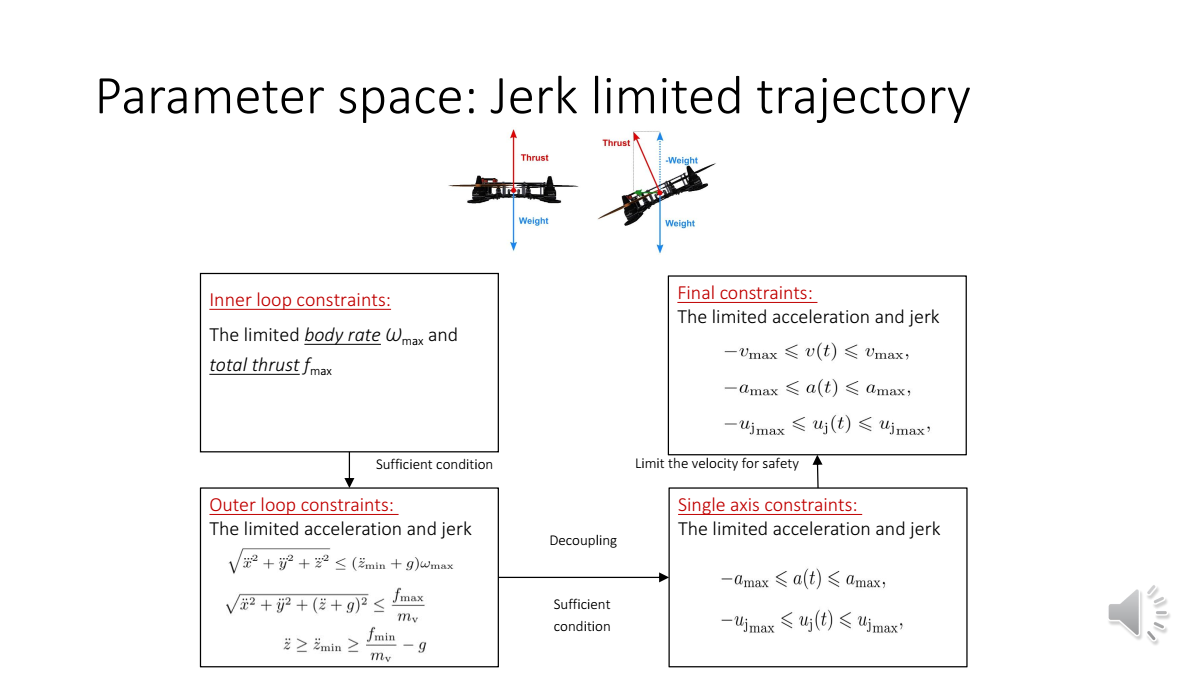
无人机内环约束(和)转化为外环约束
先推导二阶的情况(到达目标速度)
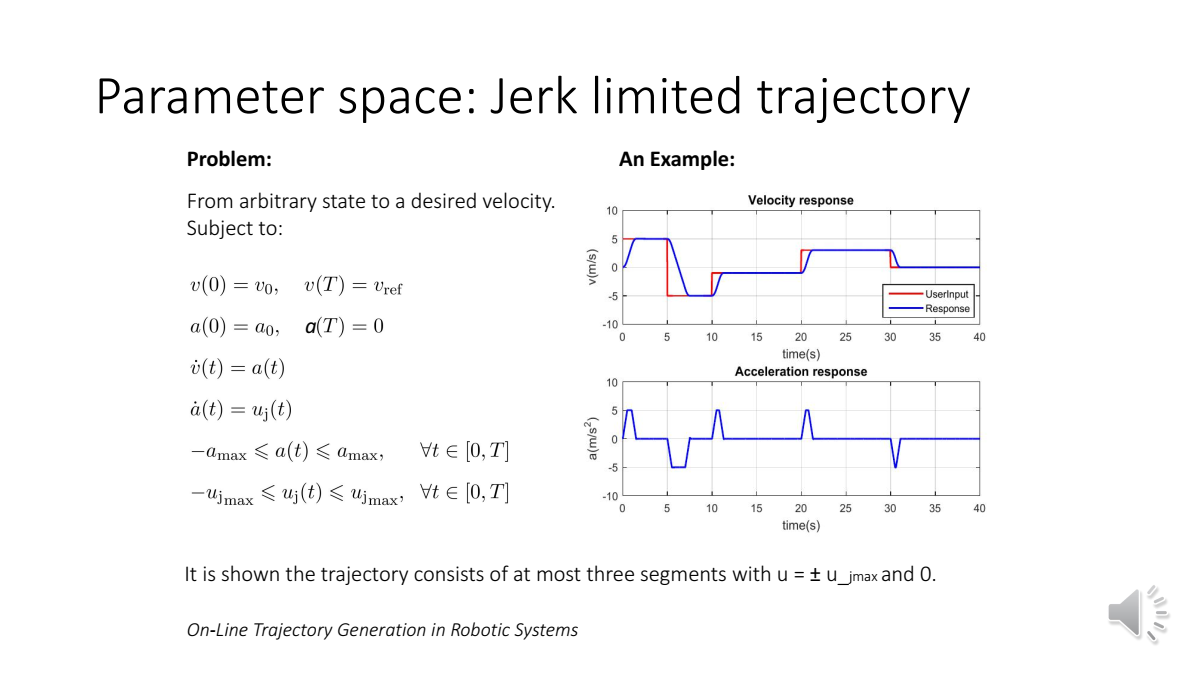
轨迹最多包含三段and的情况 (详情见:On-Line Tranjectory Generation in Robotic Systems)
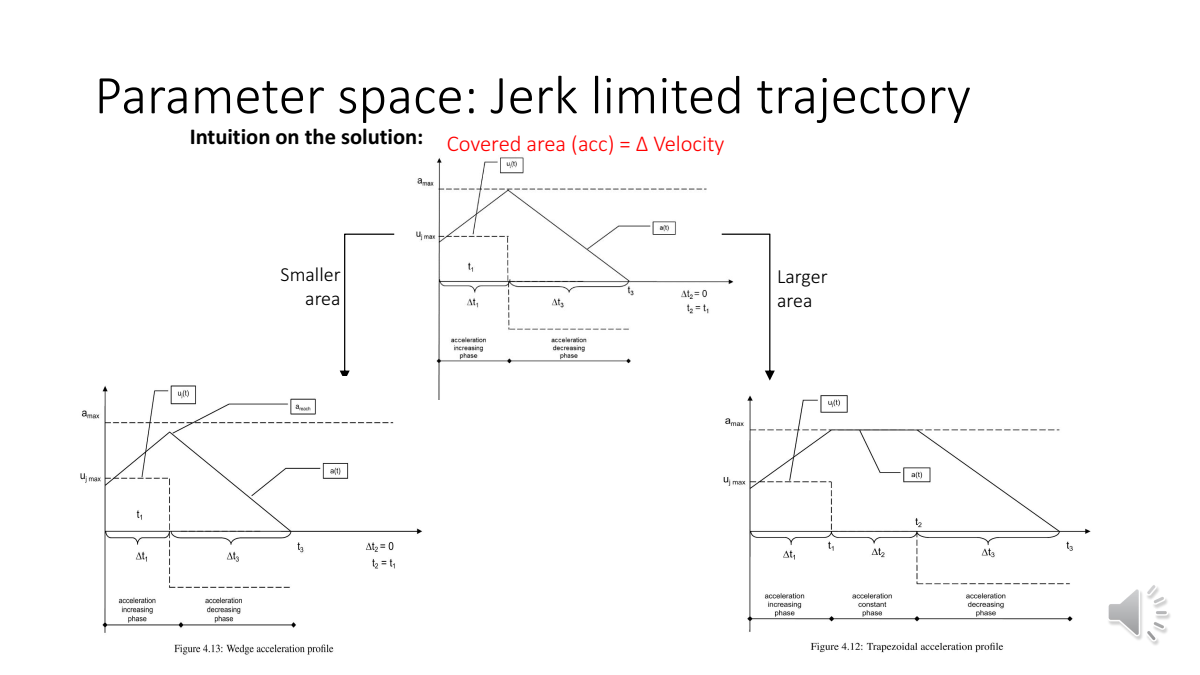
当时,先取,当达到时,取,使。与轴围成的面积即为,若,larger area——围成梯形面积,维持在一段时间;若,smaller area——实际达不到。进而可以得到输入
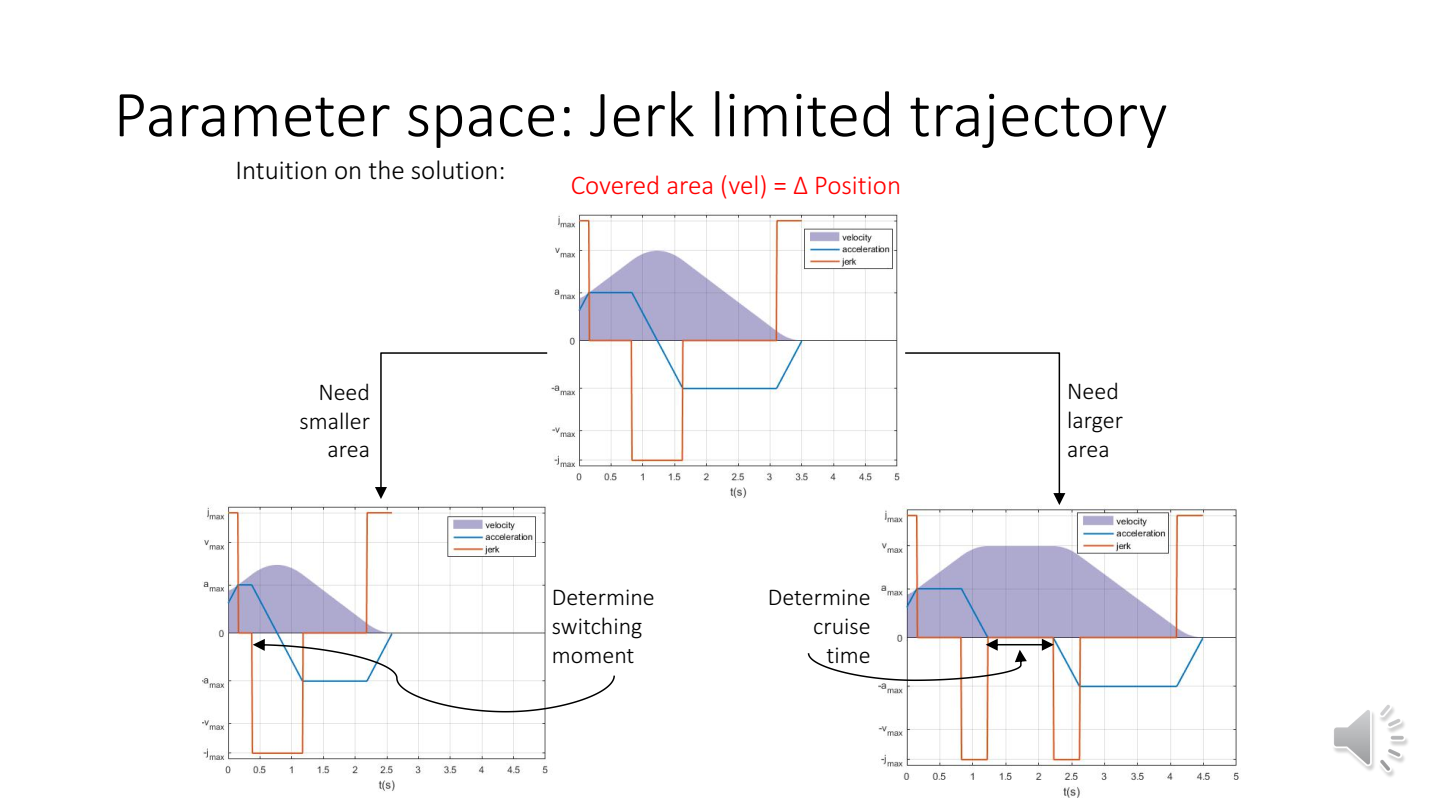
和只含v、a的二阶情况类似,含p、v、a的三阶情况是让v到最大速度,然后再让v回到0。根据这种情况下所围成的面积和实际的大小,可以求得输入的表达式
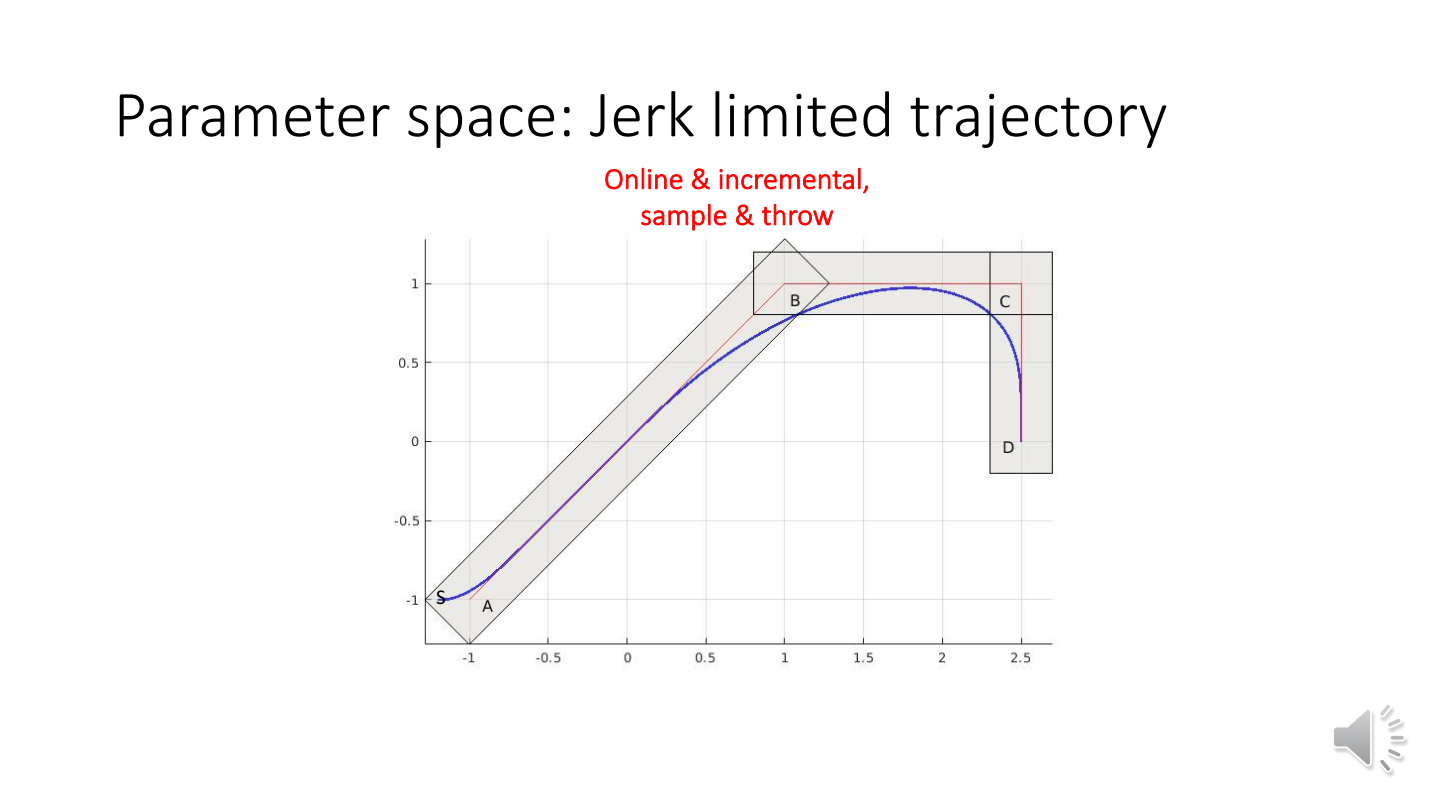
JLT+安全走廊——可以快速生成轨迹
首先生成一条从A到B的轨迹1,无人机沿着轨迹1飞行;每隔一段时间生成从当前点到C点的轨迹2,并判断轨迹2是否在安全走廊内——不在,抛弃该曲线;在,无人机跟随新的轨迹。重复
也可以二分法(查看从轨迹1中点到C点的轨迹是否在飞行走廊内部),一次性生成完整轨迹
Non-linear MPC
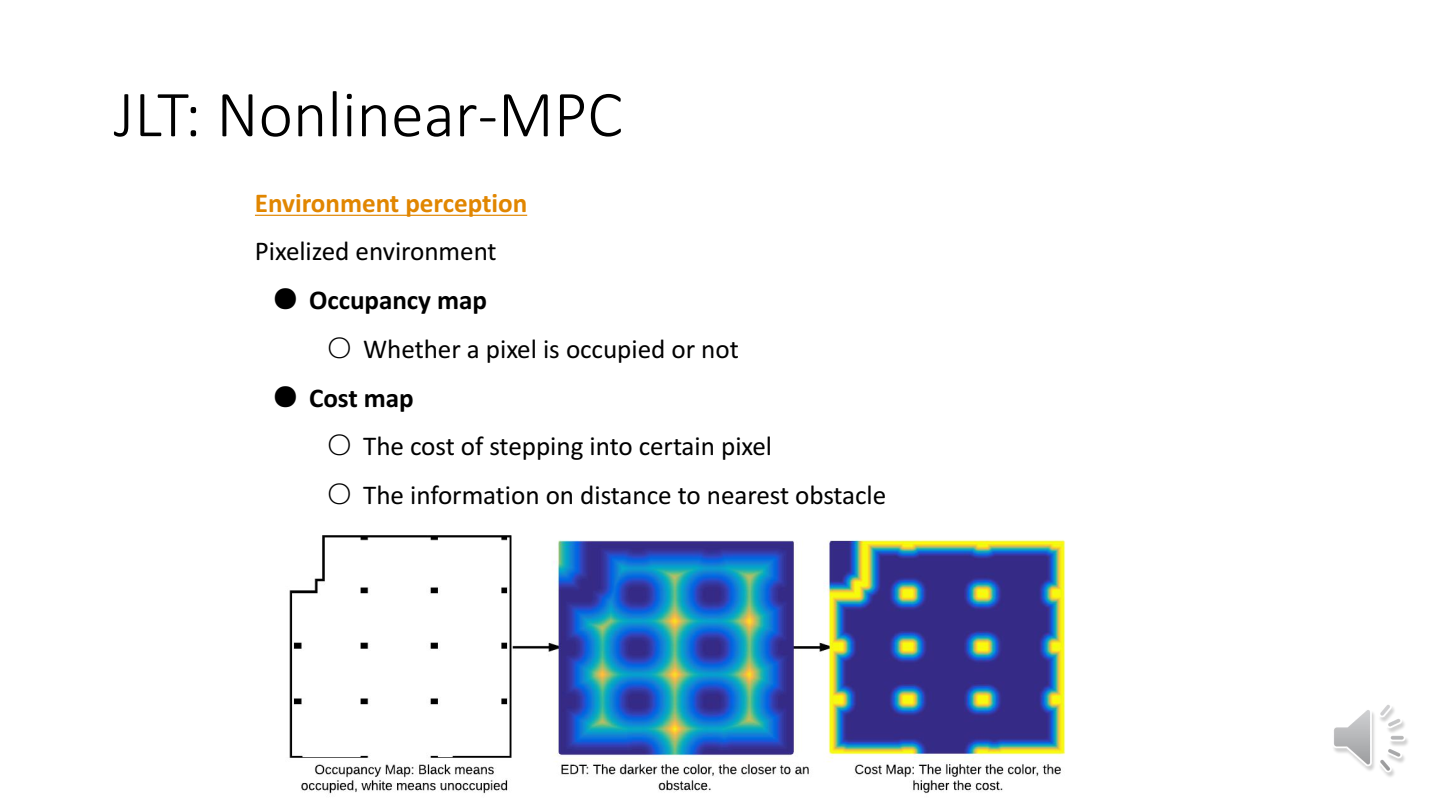
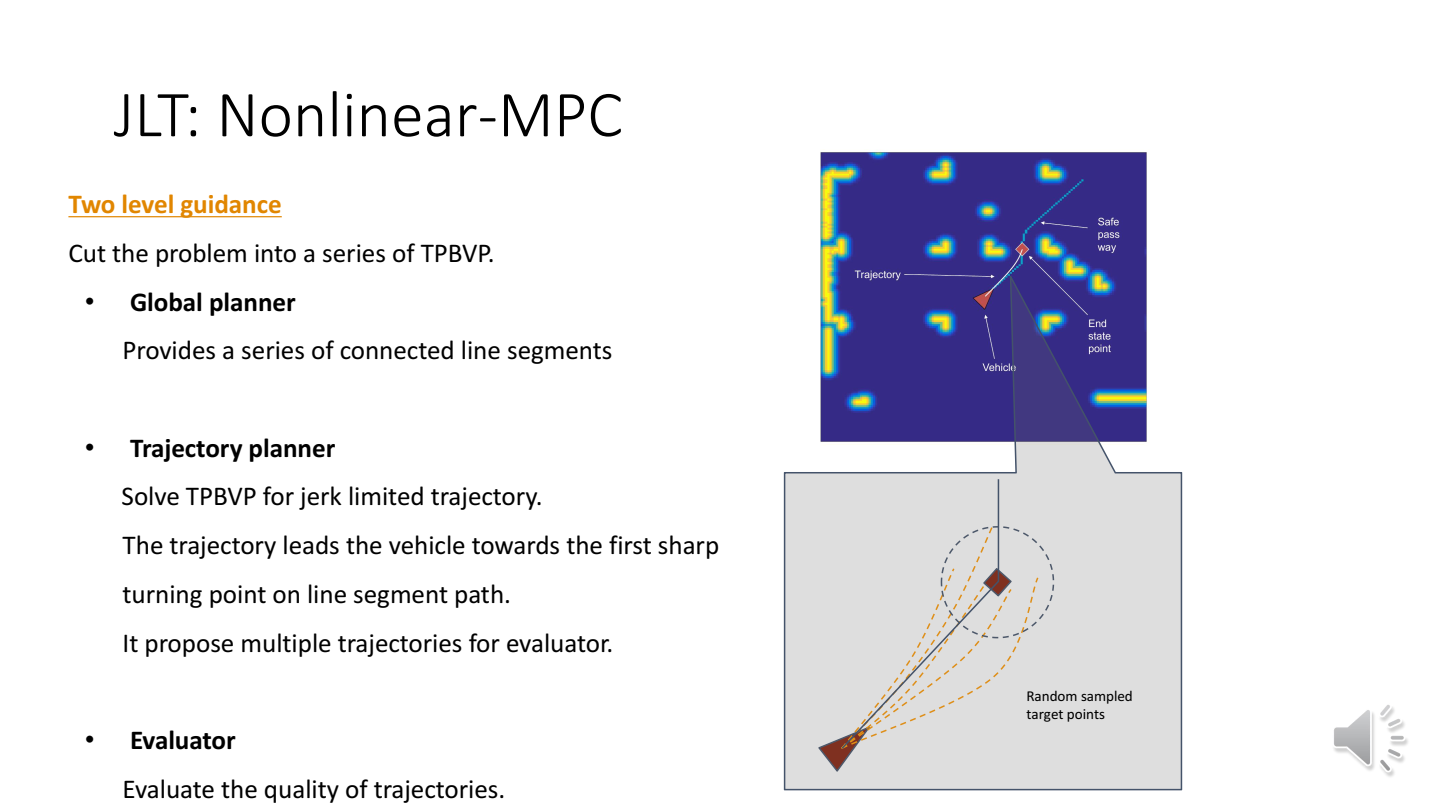
非线性MPC一般是用做局部规划器。
-
全局规划器:提供一系列连接的线段——A*、JPS…
-
局部规划器(轨迹规划器):求解JLT下的two-point boundry value problem
-
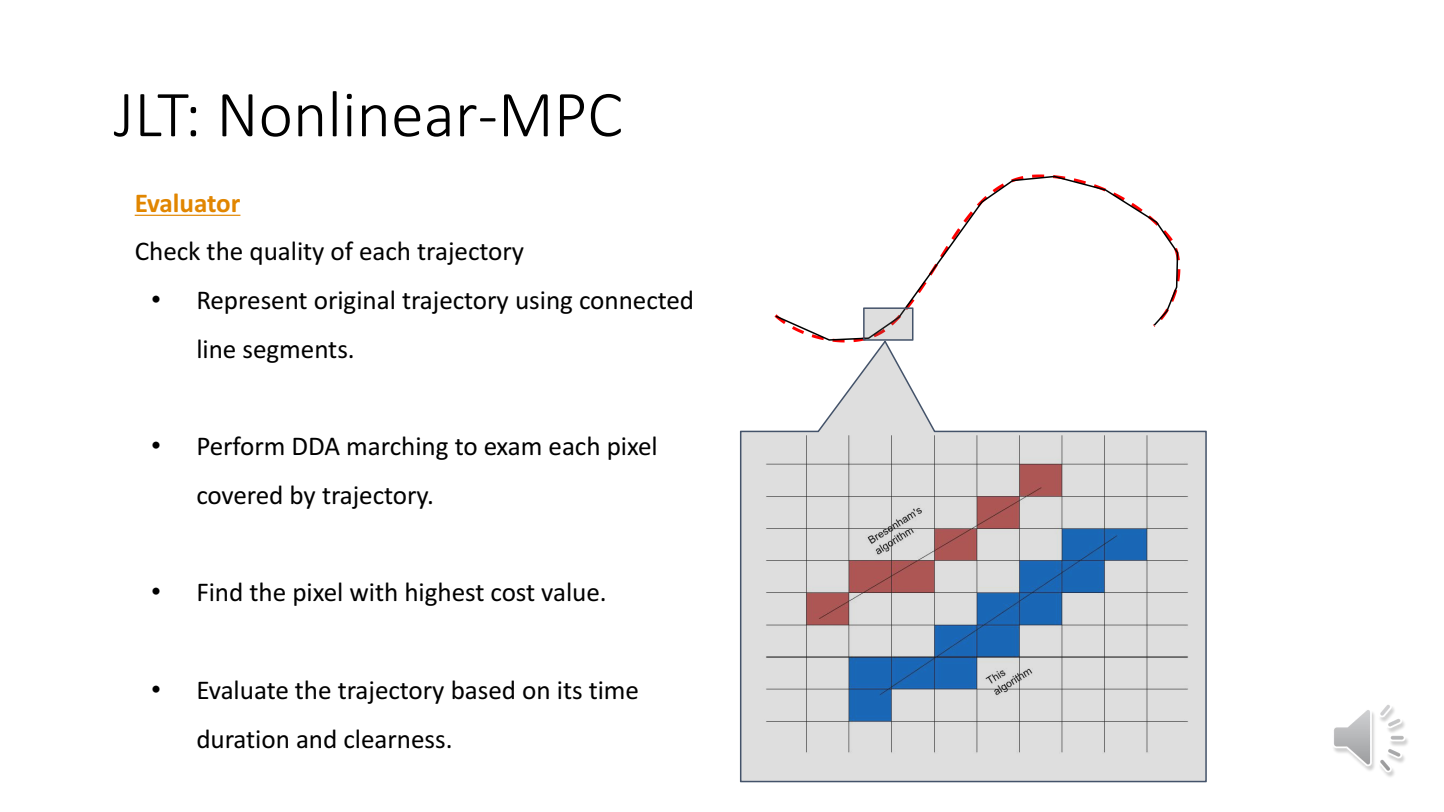
评估器
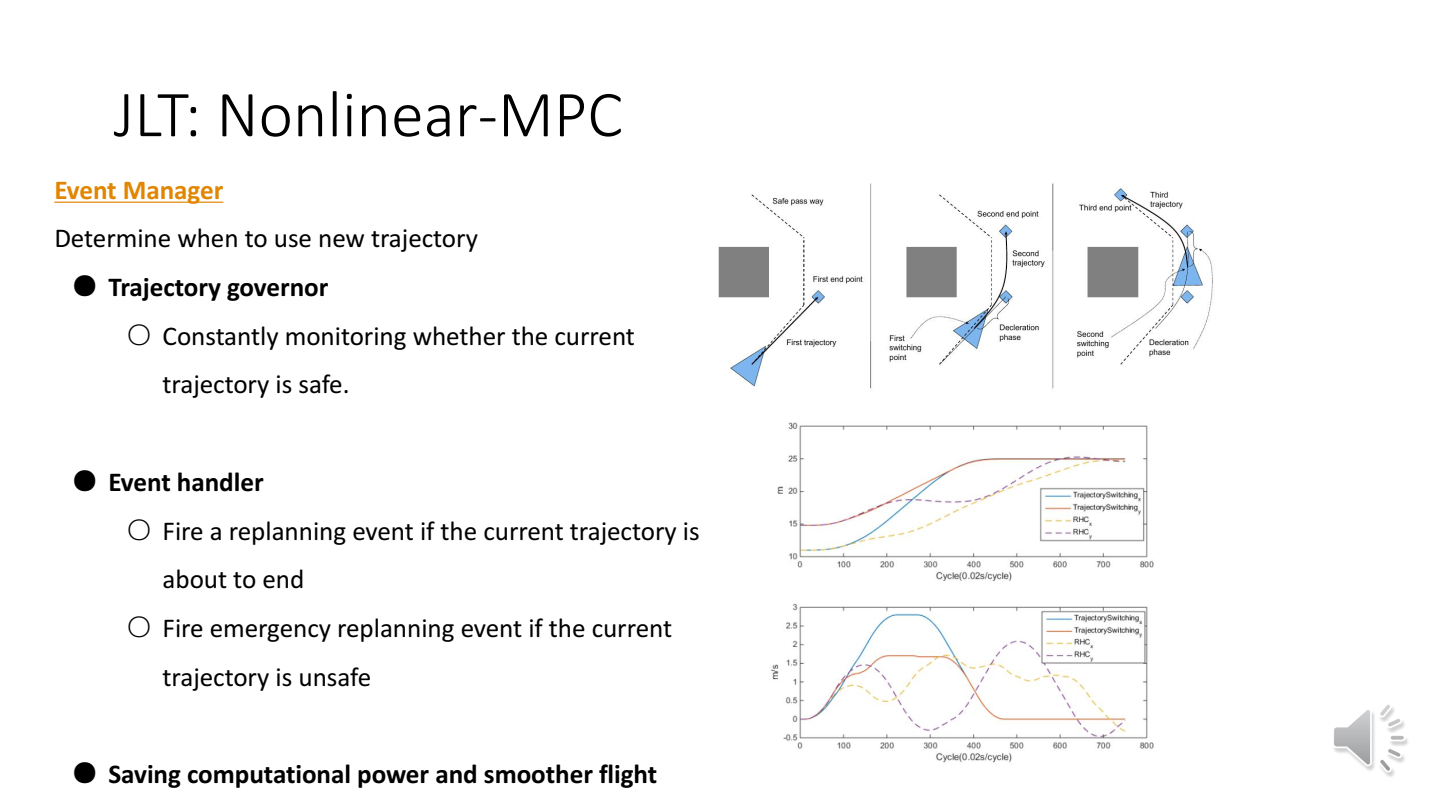
普通的MPC会每隔一小段时间计算一次输入。这往往会导致算力消耗过大,并且使生成的轨迹不平滑。而事件驱动型MPC只有当必要时才进行MPC重新计算,往往配合Tube based MPC使用(即有一个Associate controller控制轨迹)
必要情况:MPC生成的轨迹快跟踪完了,轨迹上有障碍,全局规划器路径变化
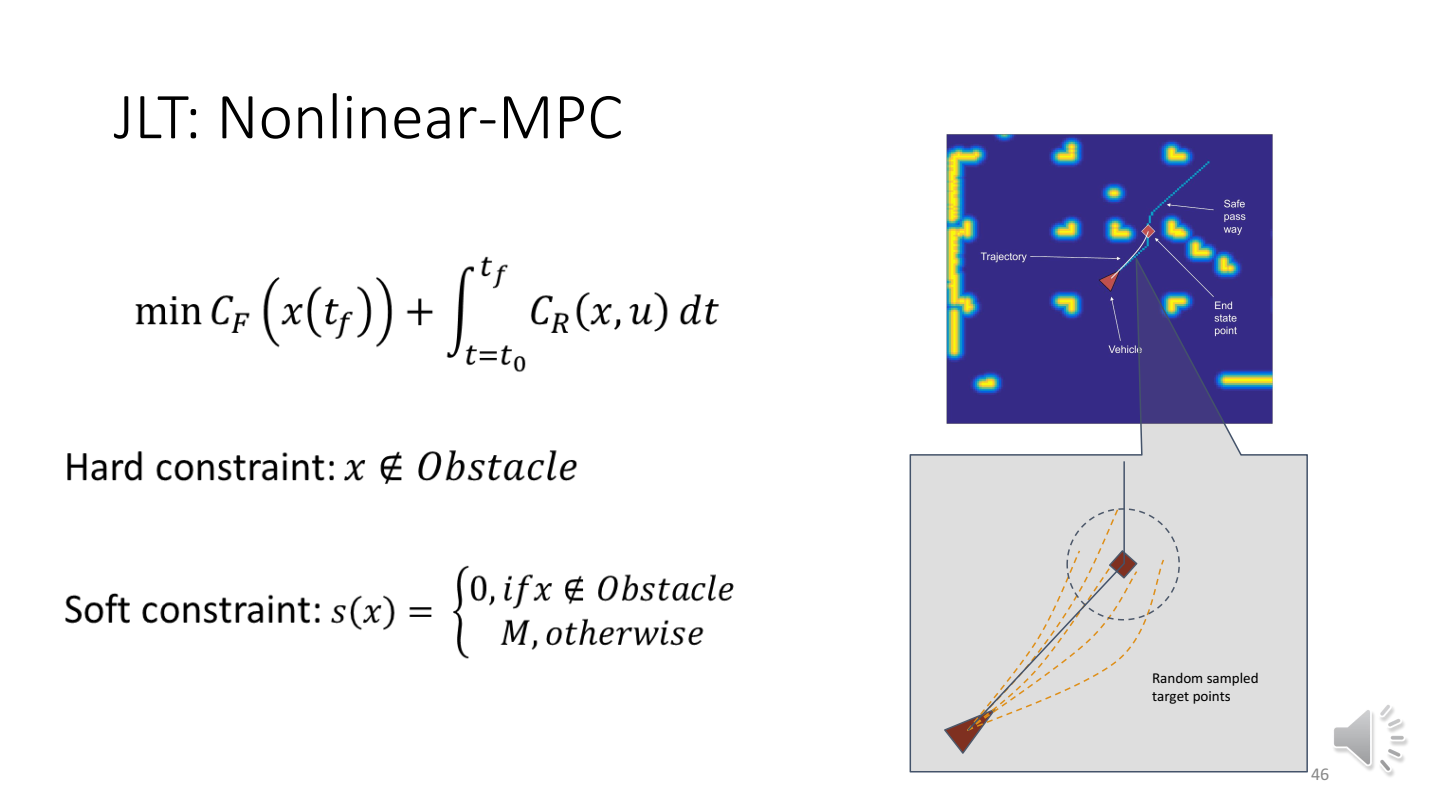
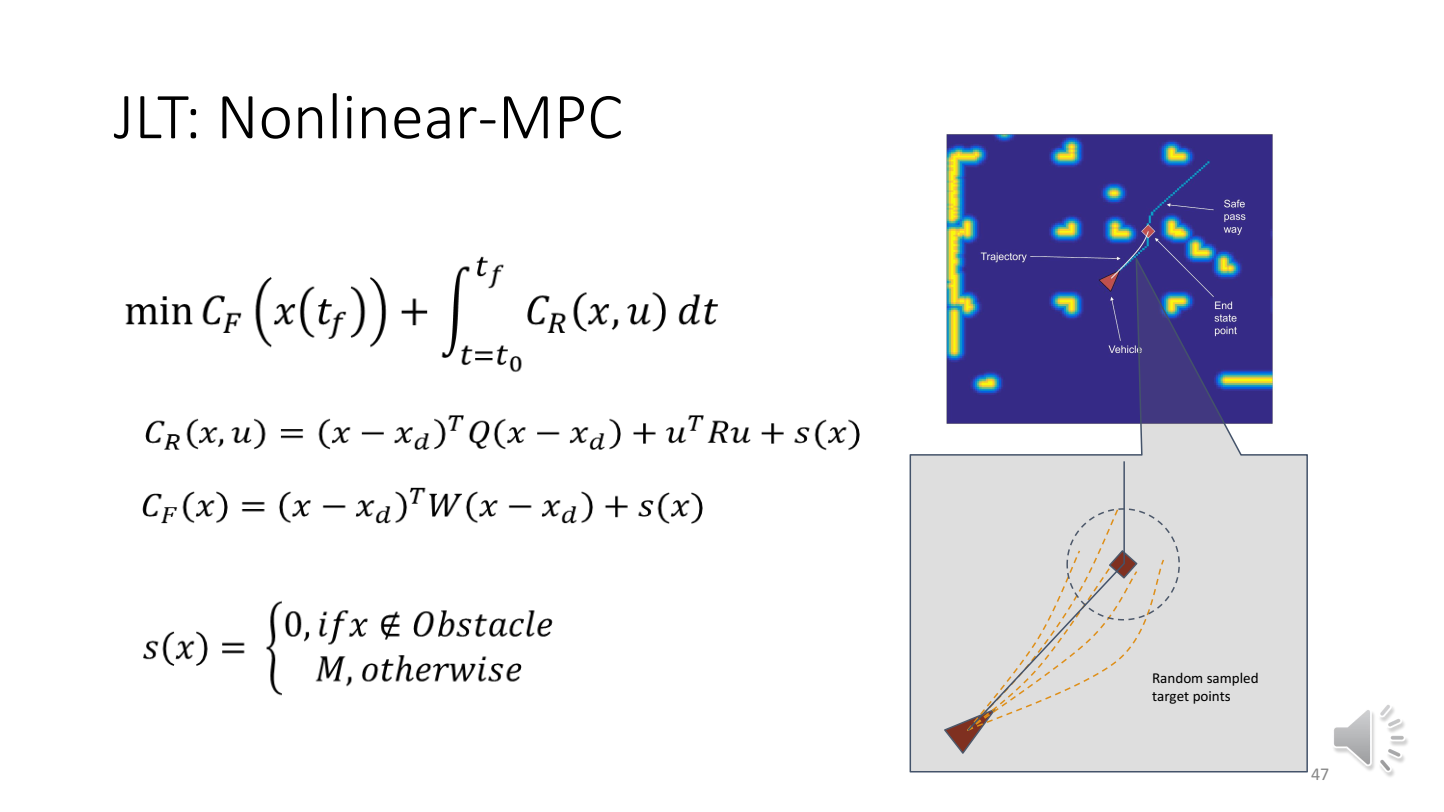
由于JLT已经天然地满足,,,优化时仅需要考虑障碍物的约束。硬约束、软约束
当使用软约束(s(x)有很强的非线性)并随机散点时,目标函数往往是不具备梯度信息的。因此,需要使用不需要梯度信息的优化方法——如粒子群优化(Particle swarm optimization)
PSO的每轮迭代的采样点(粒子)按照一定法则运动,最终收敛到最优的点附近
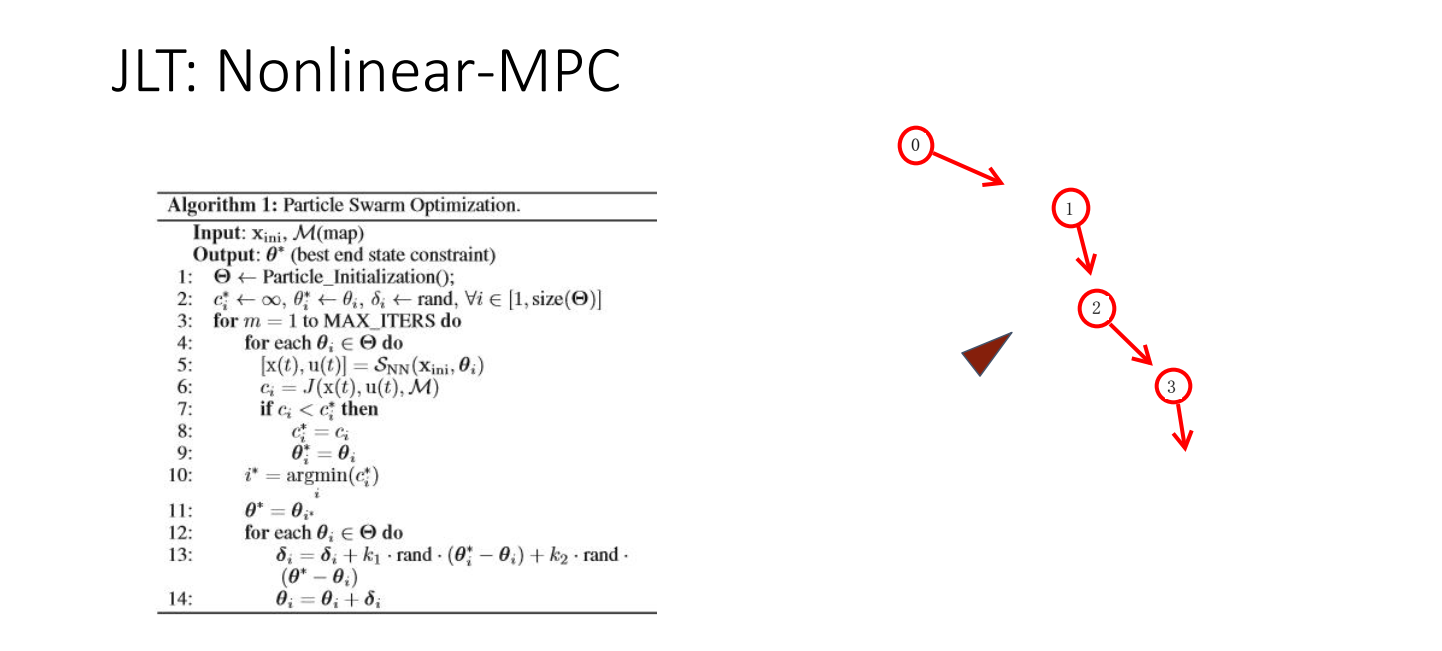
粒子每轮迭代的运动都沿速度方向
更新粒子的速度方向:考虑上一次迭代的速度方向,考虑朝全局最优的方向移动(全部粒子中的代价最小的粒子),考虑朝自身迭代历史中最优的方向移动
新的粒子速度方向为上述三个速度向量的求和(对每一项加上一个权重和随机数rand)
General BSCP
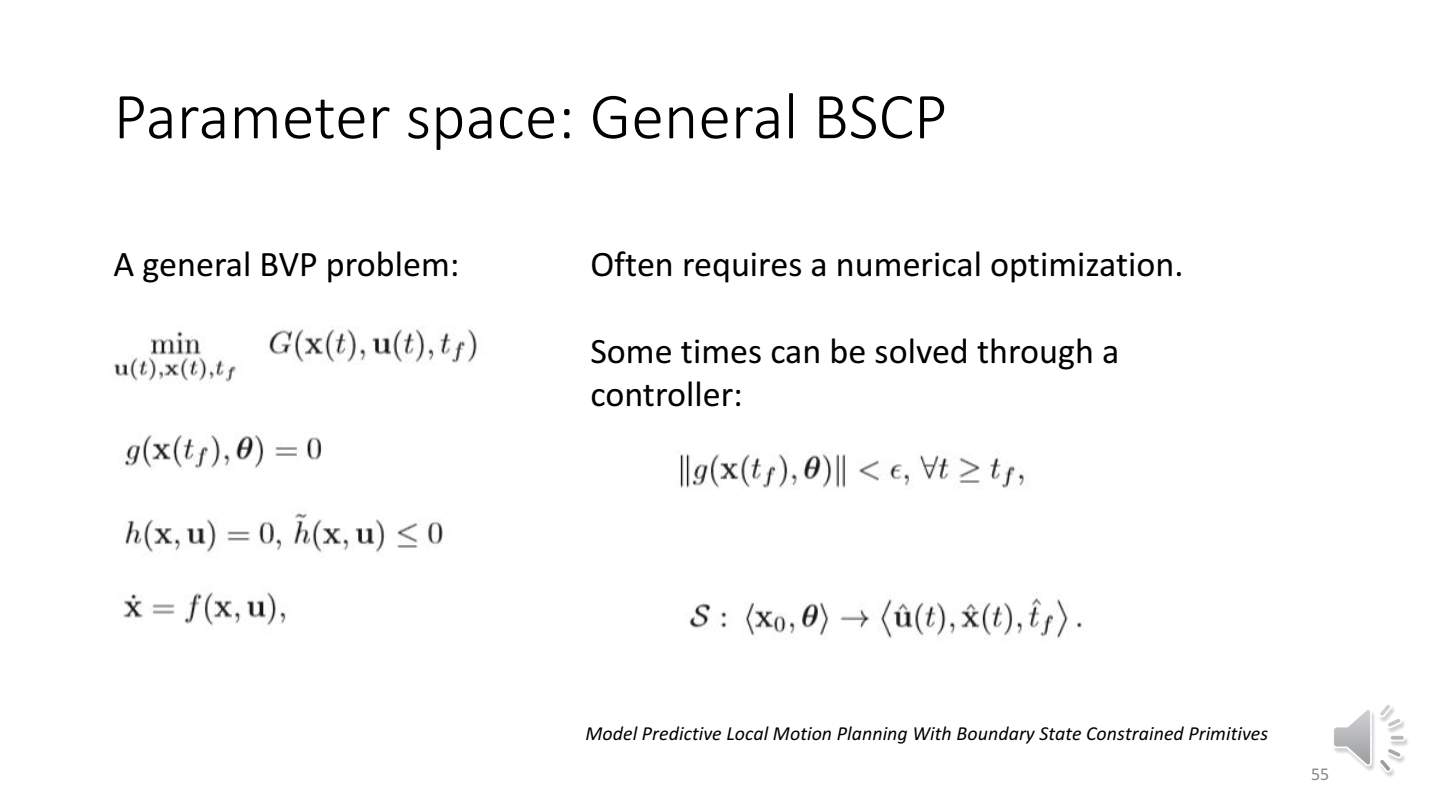
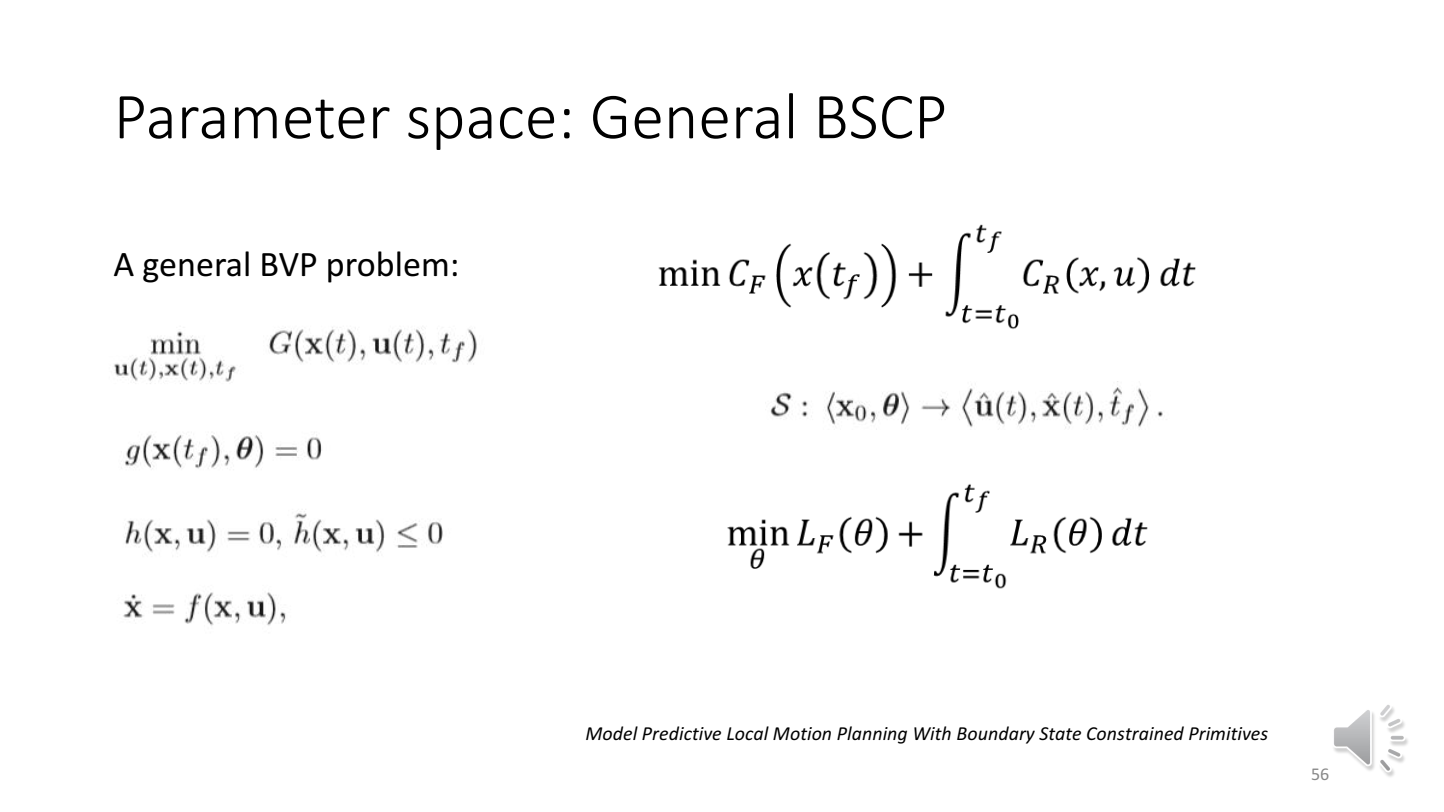
对于General BSCP,通常需要求一个数值解(一个对应一个(参数为))。该优化问题同样为离散的形式——可以使用PSO
若直接使用PSO,则一次采样需要求解一次General BSCP问题(数值解)。而PSO优化又需要大量的采样,因此会导致计算速度慢,实时性差
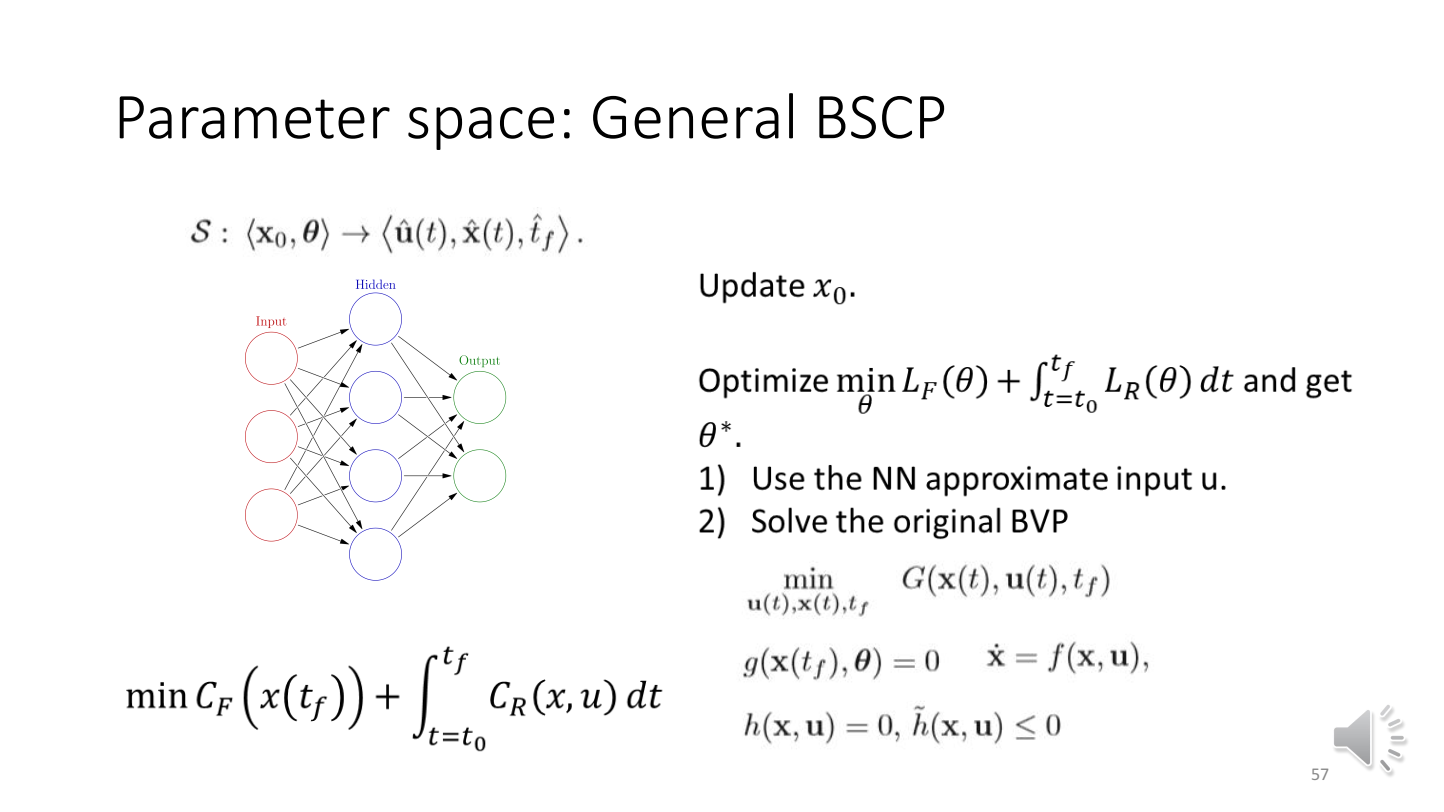
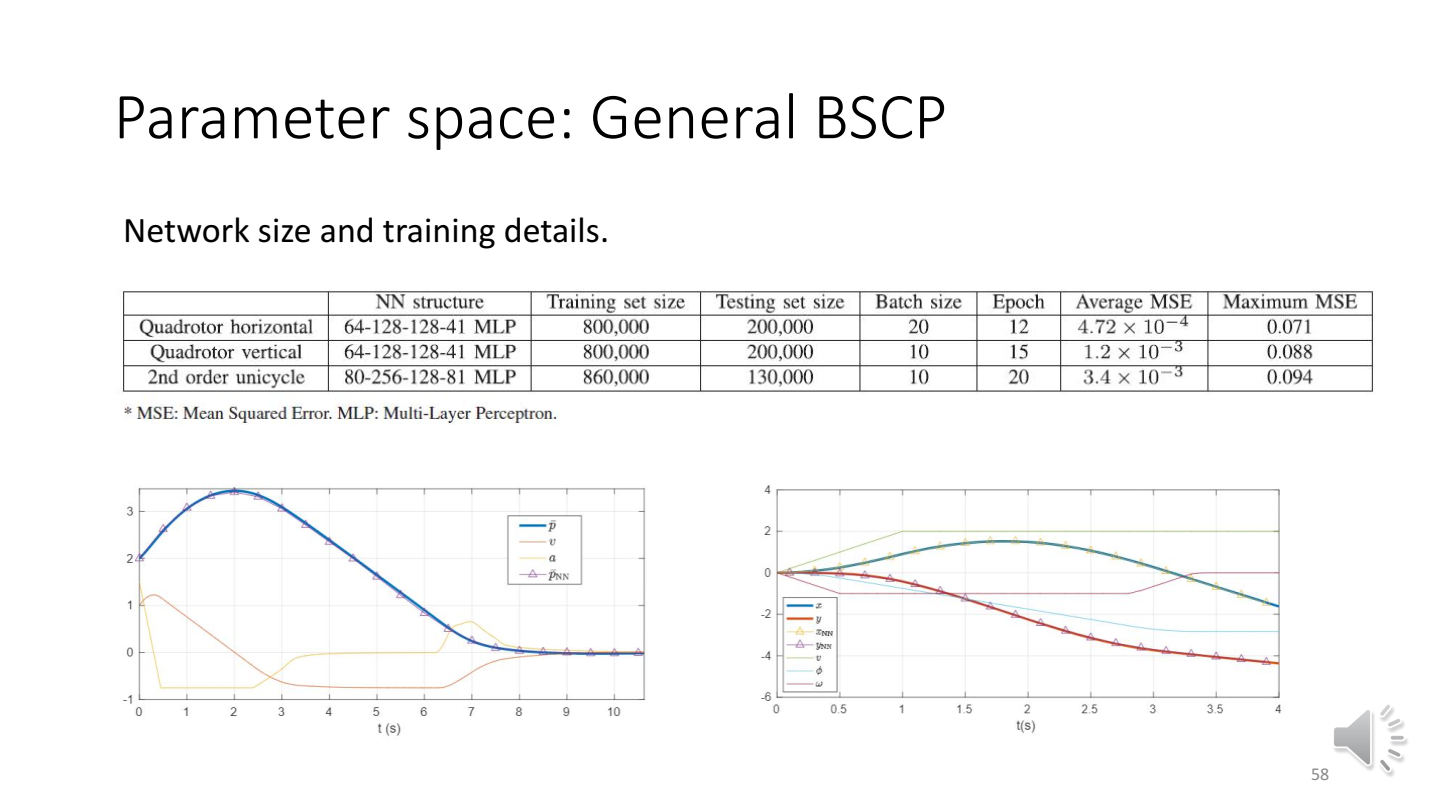
给定输入,通过神经网络得到,不需要多次求数值解。最后得到最优的参数——可以用网络得到或者求数值解保证精度
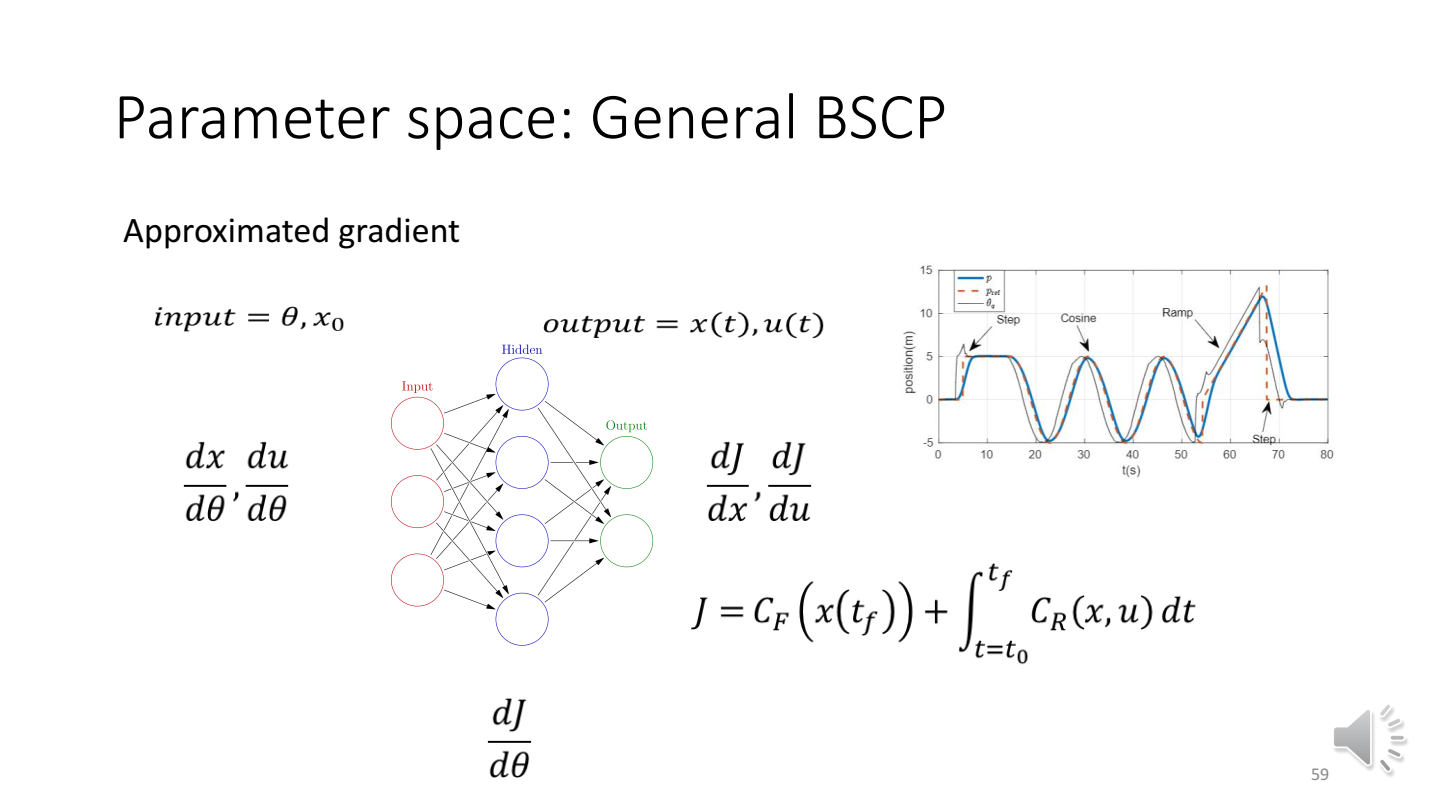
神经网络估计梯度信息
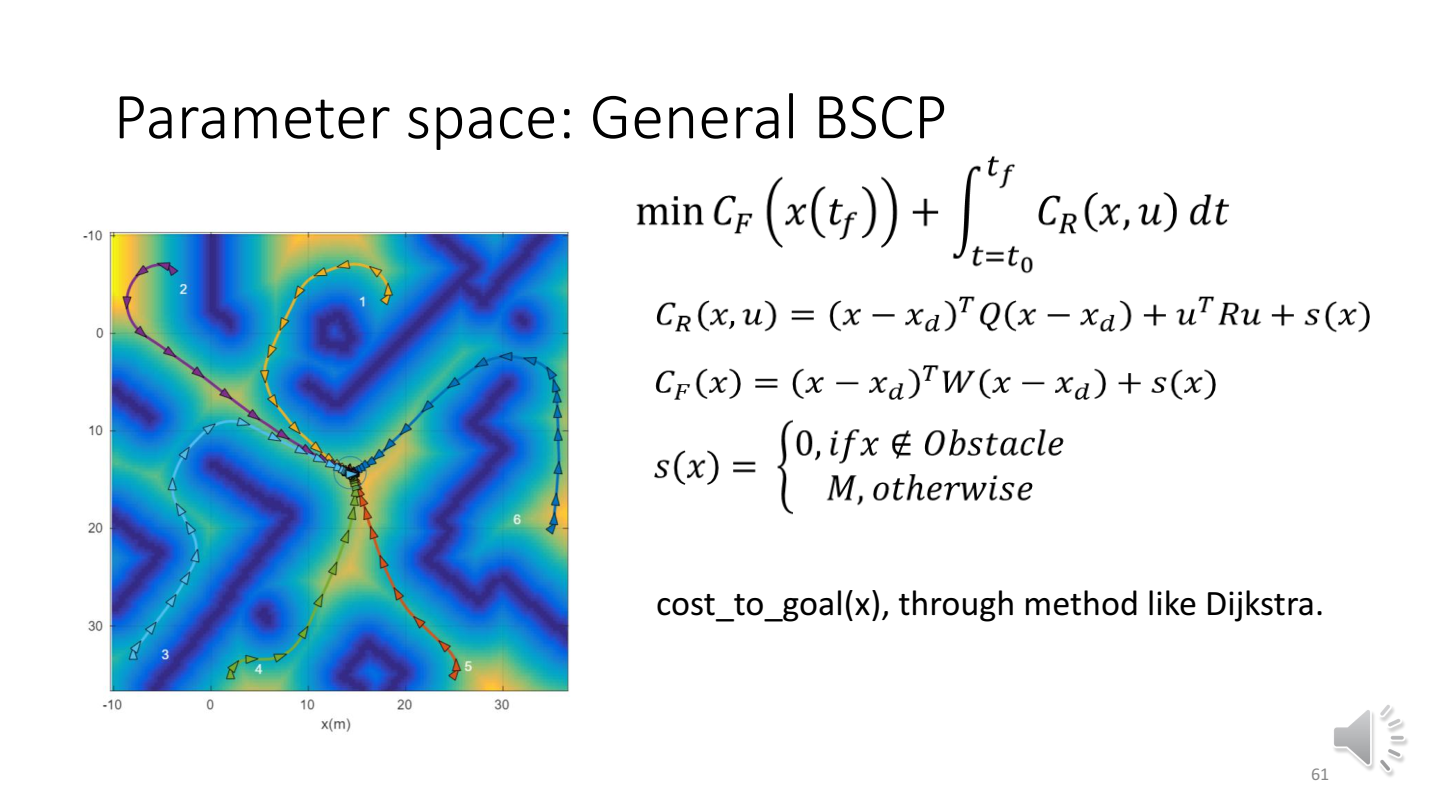
使用容易陷入局部最优(可能会使轨迹卡住),因此可以采用Dijkstra等方法得到全局最优