
基于马尔科夫决策过程的运动规划
Planning with Uncertainties
在实际应用中,机器人的执行和状态估计都存在不确定性
不确定的分类:nondeterministic(不知道不确定性的来源)、probabilistic(机器人能够估计不确定性)
两种Game的方式:
- Independent Game——robot action space和nature action space相互独立()
- Dependent Game——nature action space与robot action space有关()
函数L为代价函数
在nature参与的情况下,寻找最优的planning
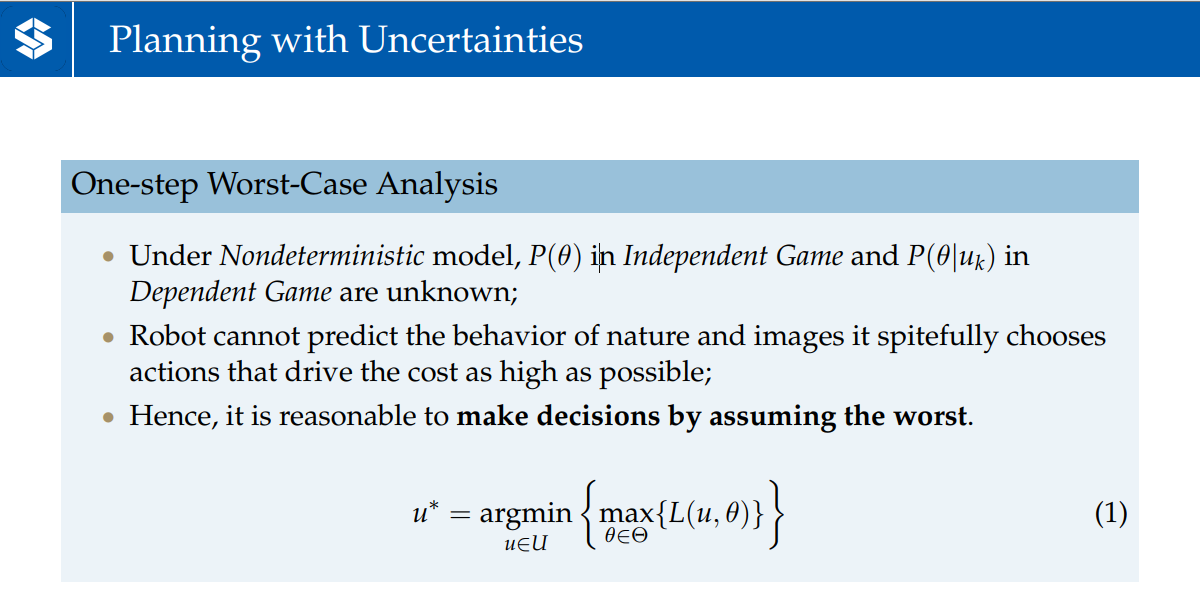
One-step Analysis:
- One-step Worst-Case Analysis:nondeterministic的模型下,执行时受到的是未知的。因此,认为每步nature可能采取最坏的策略干扰robot,选择让代价函数最大值最小的u
- One-step Expected-Case Analysis:Probabilistic的模型下,Independent Game的概率,Dependent Game的概率是已知的。因此,选择让代价函数L的期望最小的u
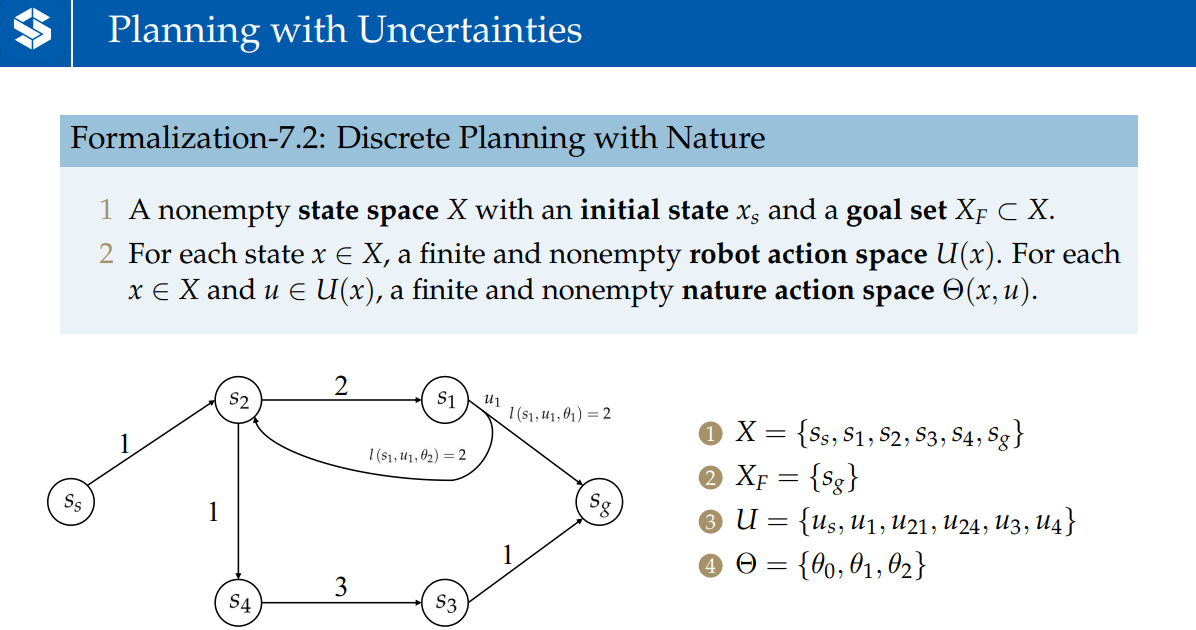
状态空间,目标状态集,robot action space,nature action space
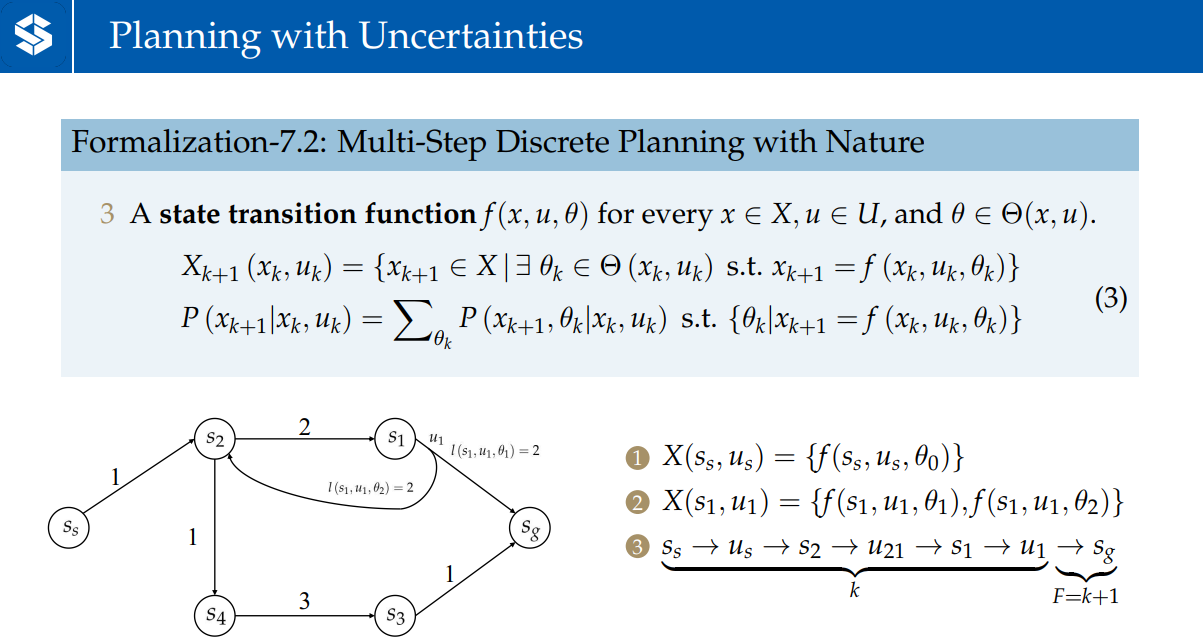
状态传递函数
离散的情况——状态集;连续的情况——相当于所有在作用下到达情况的概率的求和
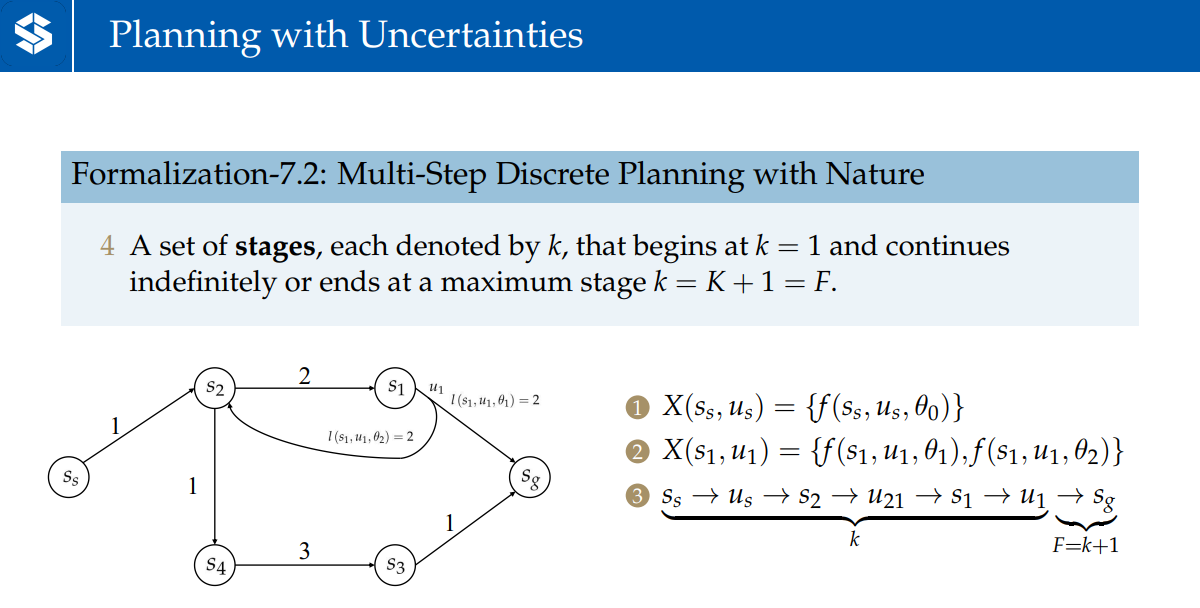
一个stage表示从起点状态到目标状态的一系列过程(这个过程有k+1个状态,k个输入)
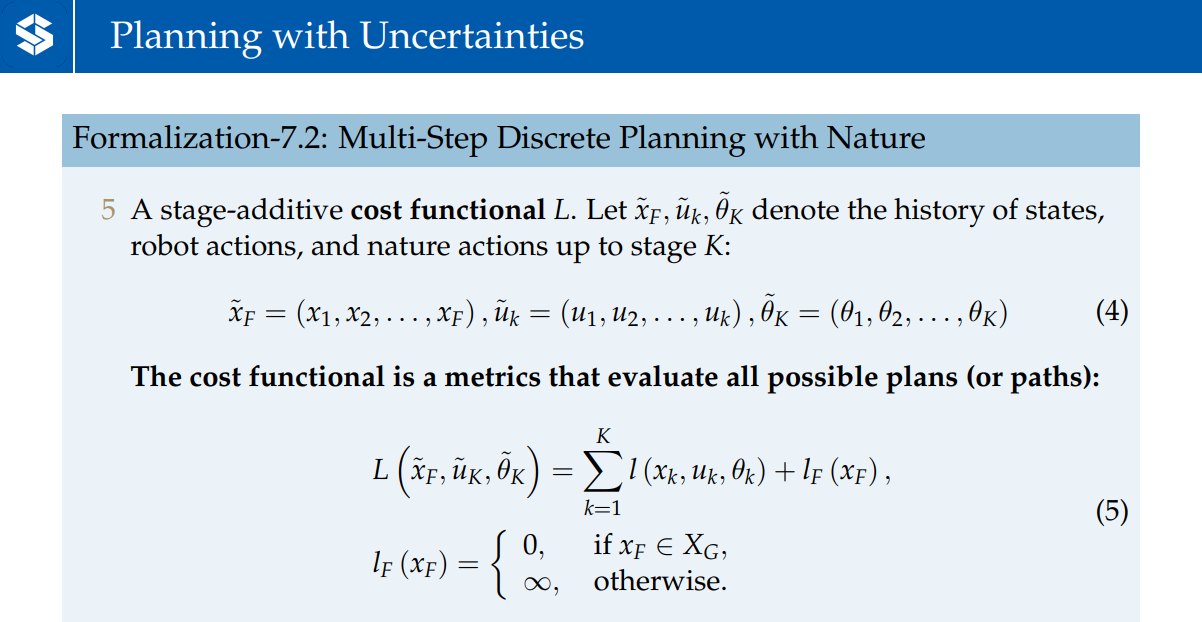
planning with uncertainties的定义
表示单步的代价函数
Markov Decision Process
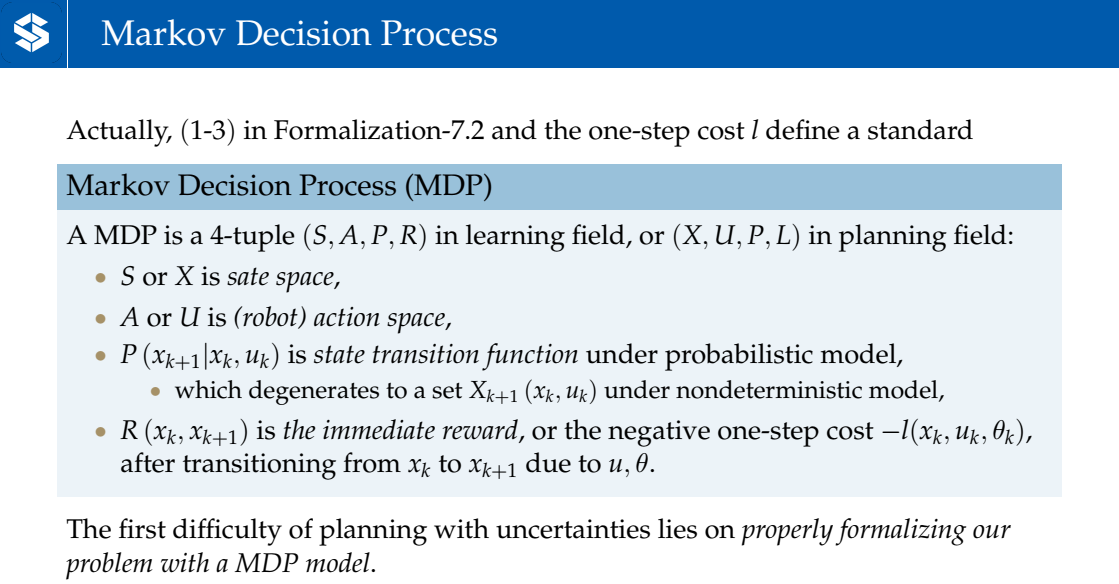
马尔科夫决策定义了状态转移函数和即时激励函数——相当于单步的代价函数
难点:如何把问题构建成一个MDP模型,示例如下:
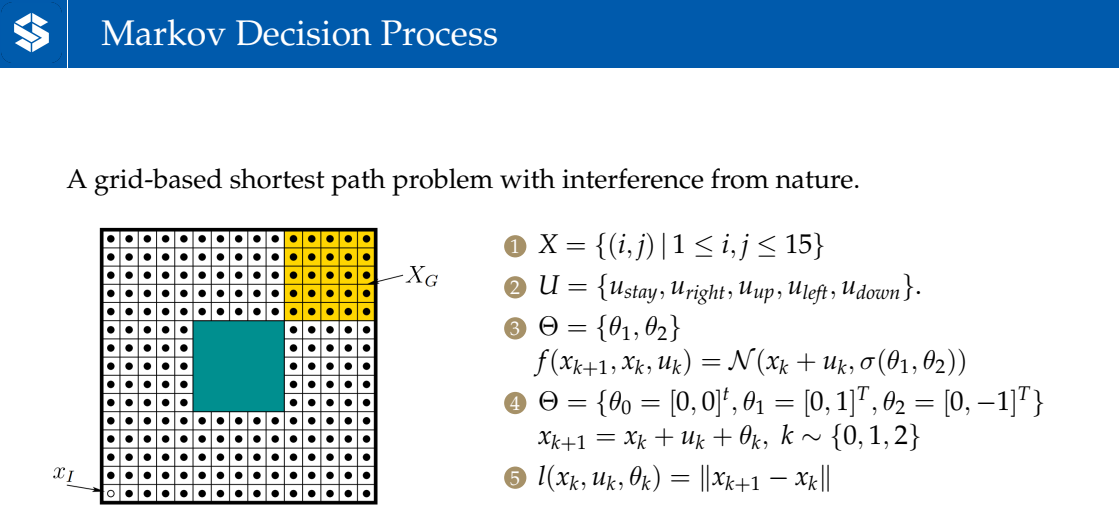
3相当于状态传递函数为在影响下所形成的高斯分布
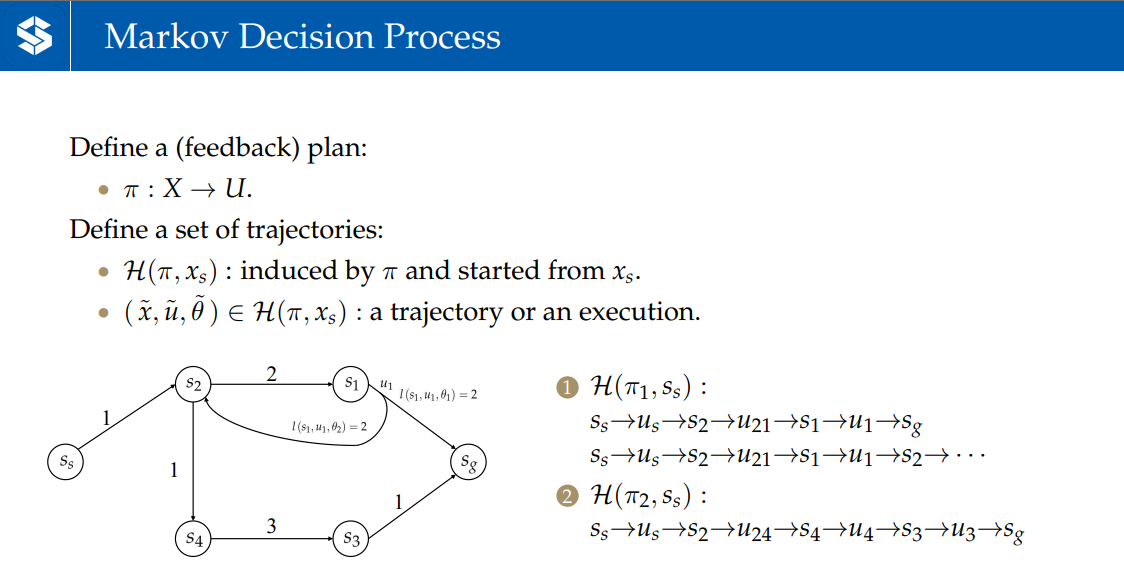
:规划状态下应该执行的动作
:由诱发的从起点的终点的trajectory集合
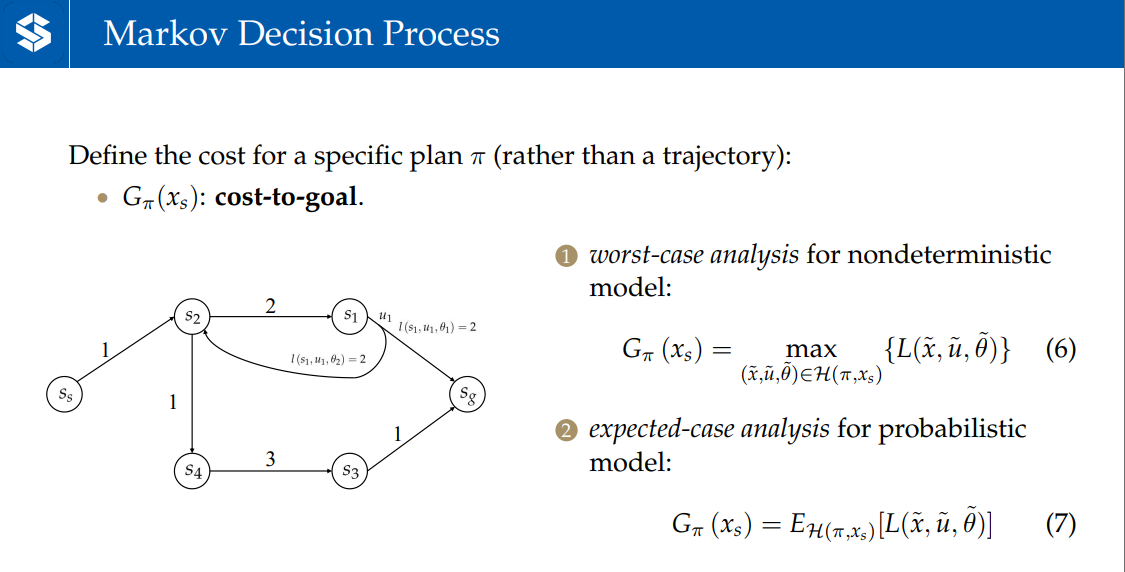
表示到目标点的代价。对于nondeterministic的模型,G等于所有诱导出的trajectory中代价最大的trajectory的代价;对于probablistic模型,G等于所有诱导出的trajectory的代价取平均
Minimax Cost Planning
直接求解较麻烦,用动态规划(Dynamic Programming)建立优化问题——寻找第k步和第k+1步的optimal plan的递归关系
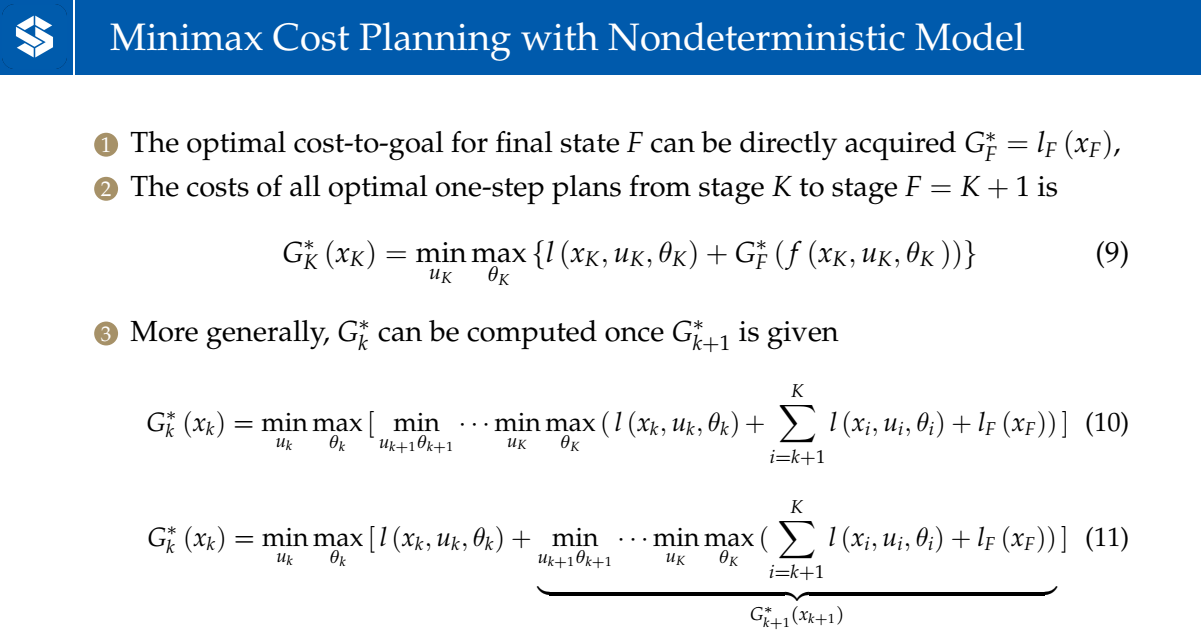
表示终末状态的前继节点状态
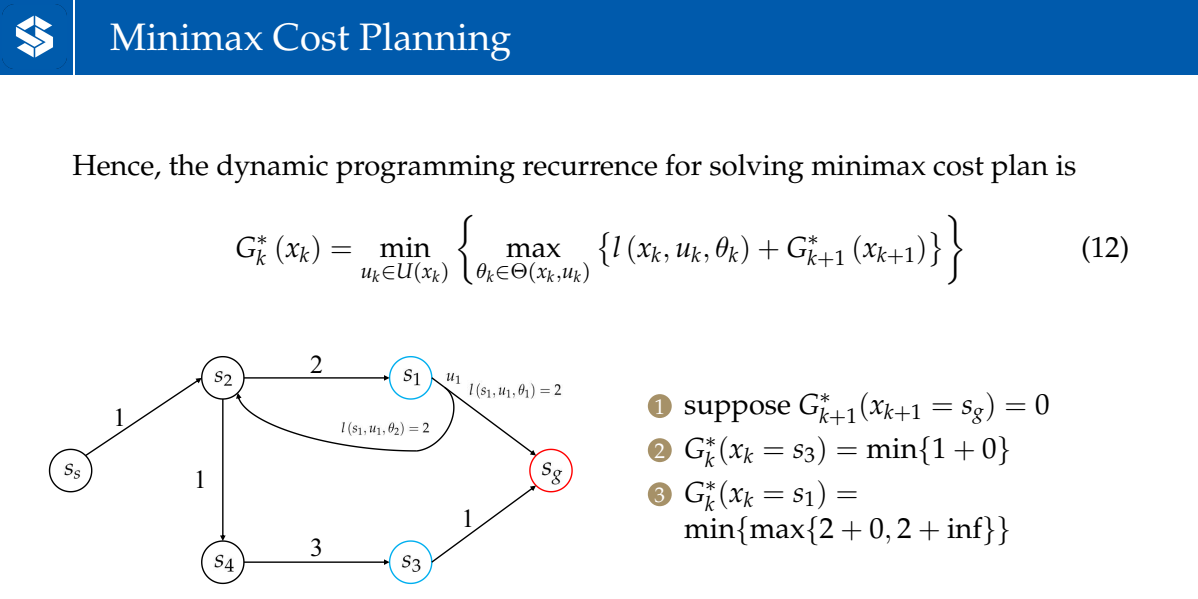
中有一项含inf是因为,在未遍历到的情况下,=inf
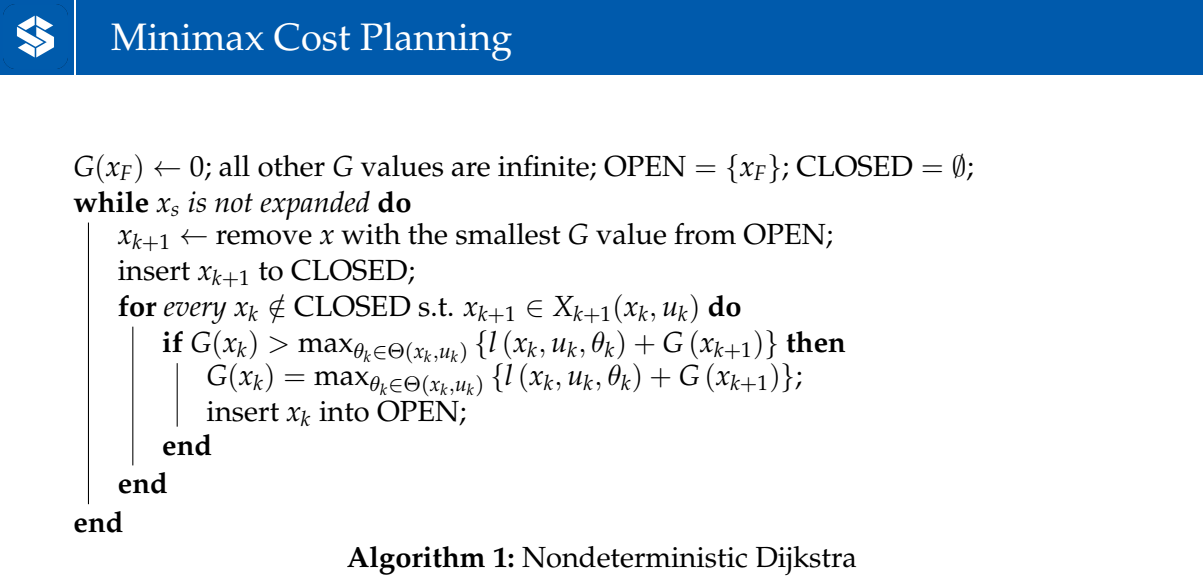
和Dijkstra算法类似(能使状态从到状态,相当于能否通过使变小)
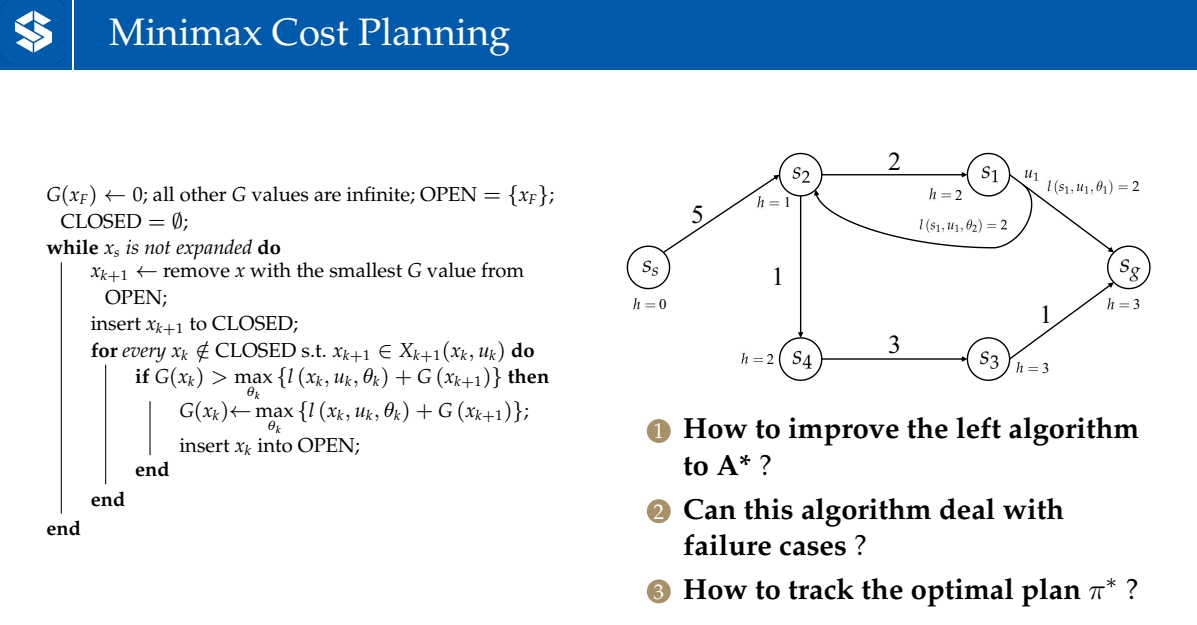
1:将该算法improve to A*:用当前节点到起点的距离作为启发式函数(如图中所示,到的启发式函数为2——到至少要经过两步)
2:对于failure case,如图中的、,先拓展之后进入闭集,便无法和形成循环,拓展之后也进入闭集
3:存储每个状态下应该选取的
优缺点:对不确定性的鲁棒性强;但过于悲观,且计算较困难(最终得到一个决策树)
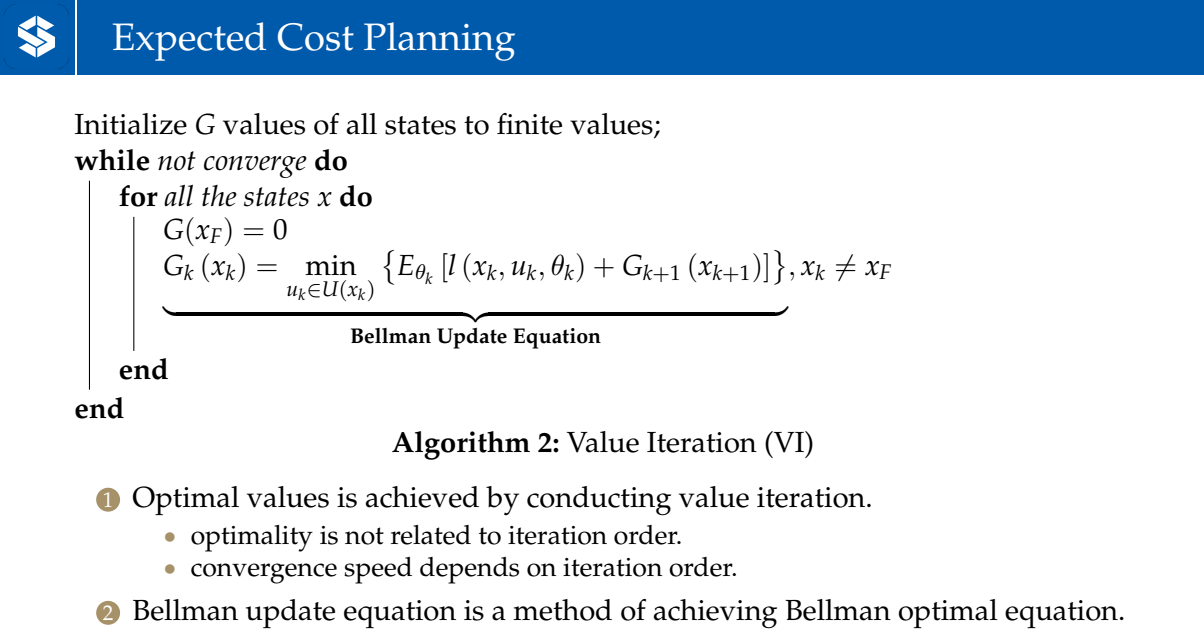
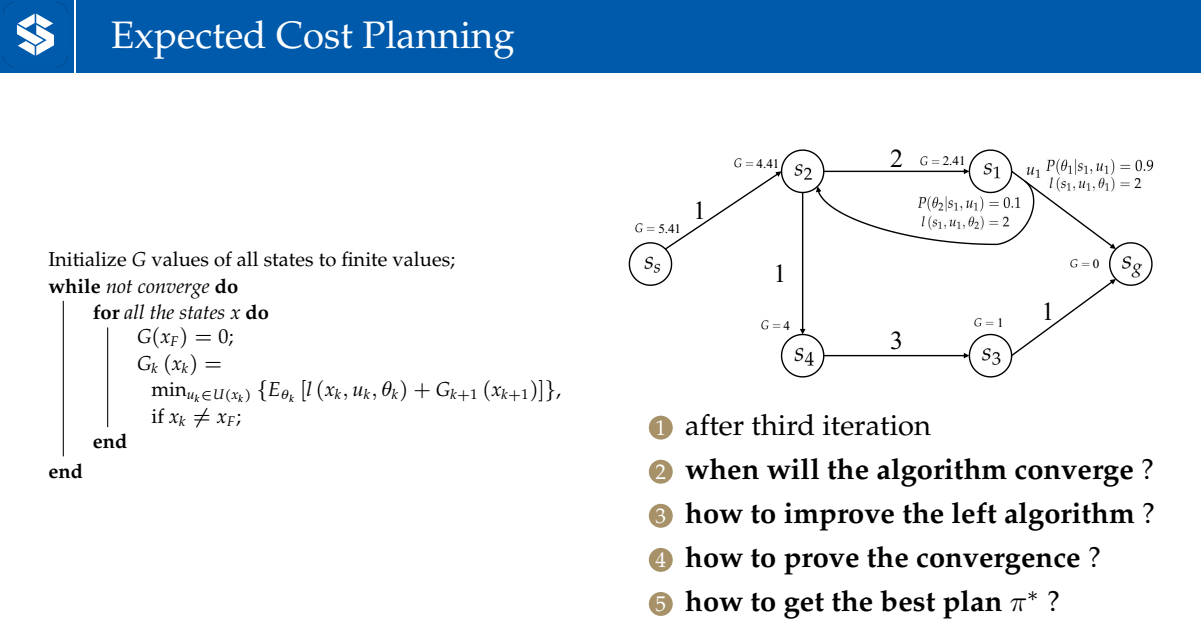
Excepted Cost Planning
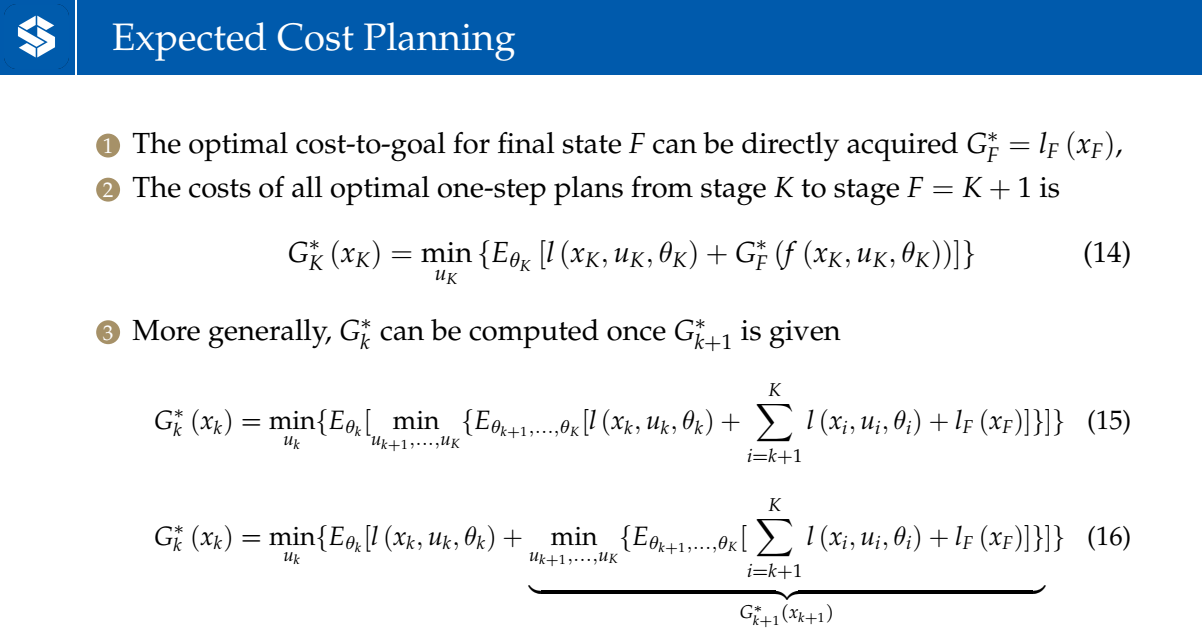
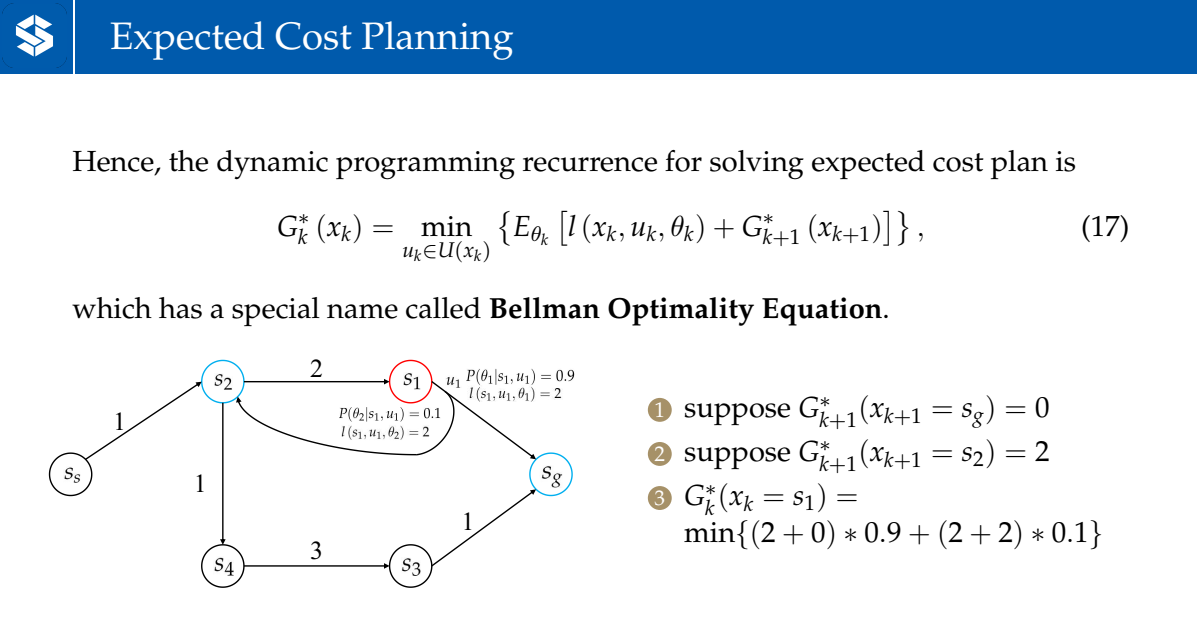
Except Cost Planning和Minimax Cost Planning的的递推类似
Bellman Optimality Equation
概率最优(单次的执行并不一定是最优的)
Real Time Dynamic Programming
- 用admissible values(小于真实cost的值)去初始化G值
- 从起点开始,遵循贪心策略(判断可达节点中哪个节点的值最小,选该节点作为后继节点),直到找到一条达到目标的轨迹
- 更新轨迹上的所有状态节点的G值
- 重复2—4步,直到当前贪心策略生成的轨迹上的所有的状态都满足Bellman errors<,为本次G值和上一次G值之差的绝对值