基于采样的路径规划
采样基础:
不用显式的构造机器人的工作空间及其边界,只需要指出单个机器人是否发生了碰撞
完备的规划器、概率完备的规划器、解析完备的规划器(和概率完备的规划器类似,但采样是基于固定的栅格)
Probabilistic Road Map(概率路图)
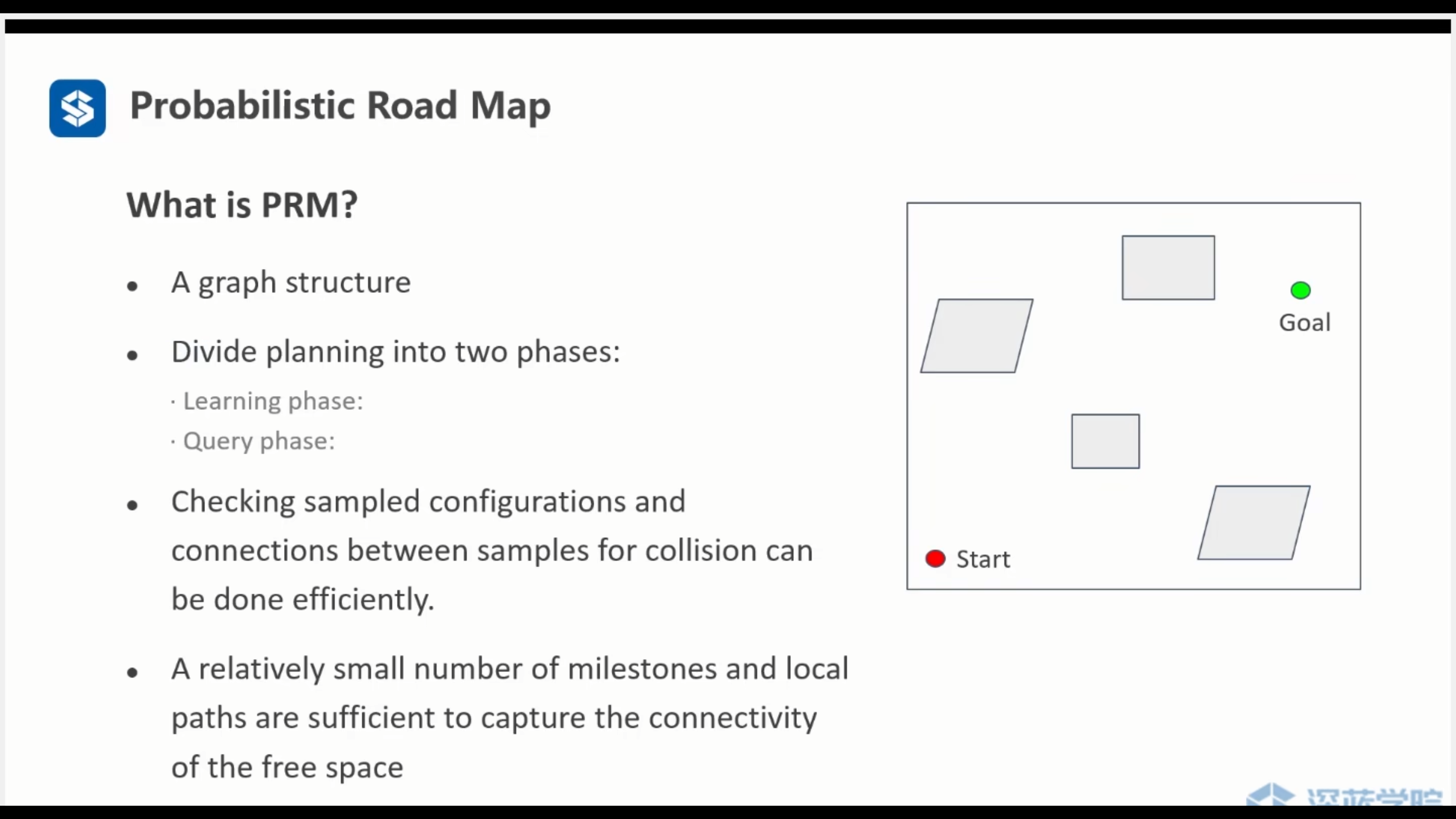
PRM的两个阶段:
-
学习阶段:随机撒点,生成一个图结构
- 采样:基于一定的采样规则,随机采样;删除有障碍碰撞的点
- 连接(起点和终点要连接):过远的点之间不用连接,删除掉连接有障碍物碰撞的线段
-
查询阶段:快速找到路径(利用A*和Dijkstra算法)
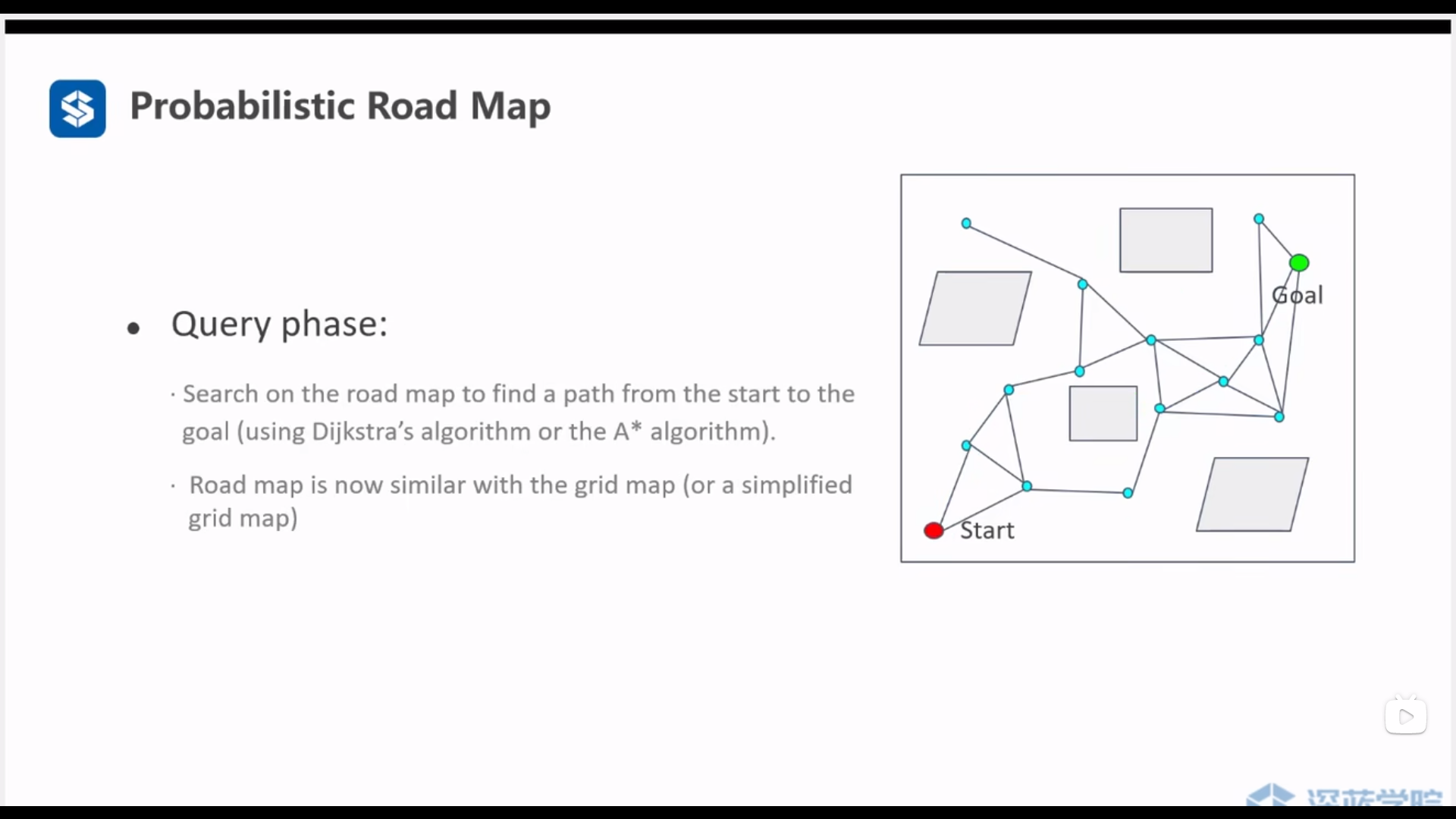
优点:概率完备、效率高
缺点:要求先学习再查询(在学习阶段的时候没有把生成路径作为重点)
Lazy collision-checking(惰性障碍检测)
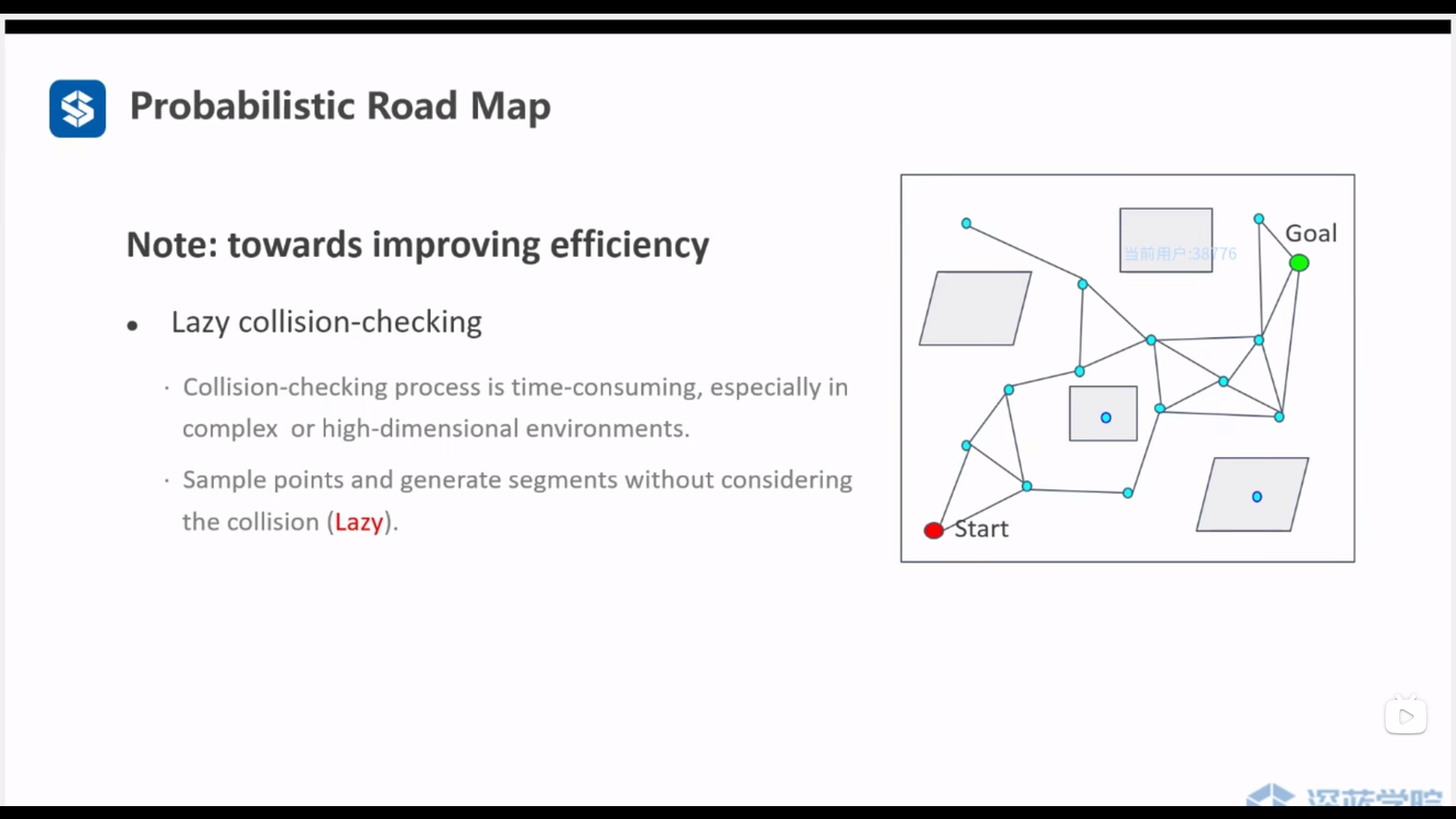
障碍检测是一个费时操作
惰性障碍检测:随机采点和生成线段时不考虑障碍(Lazy)
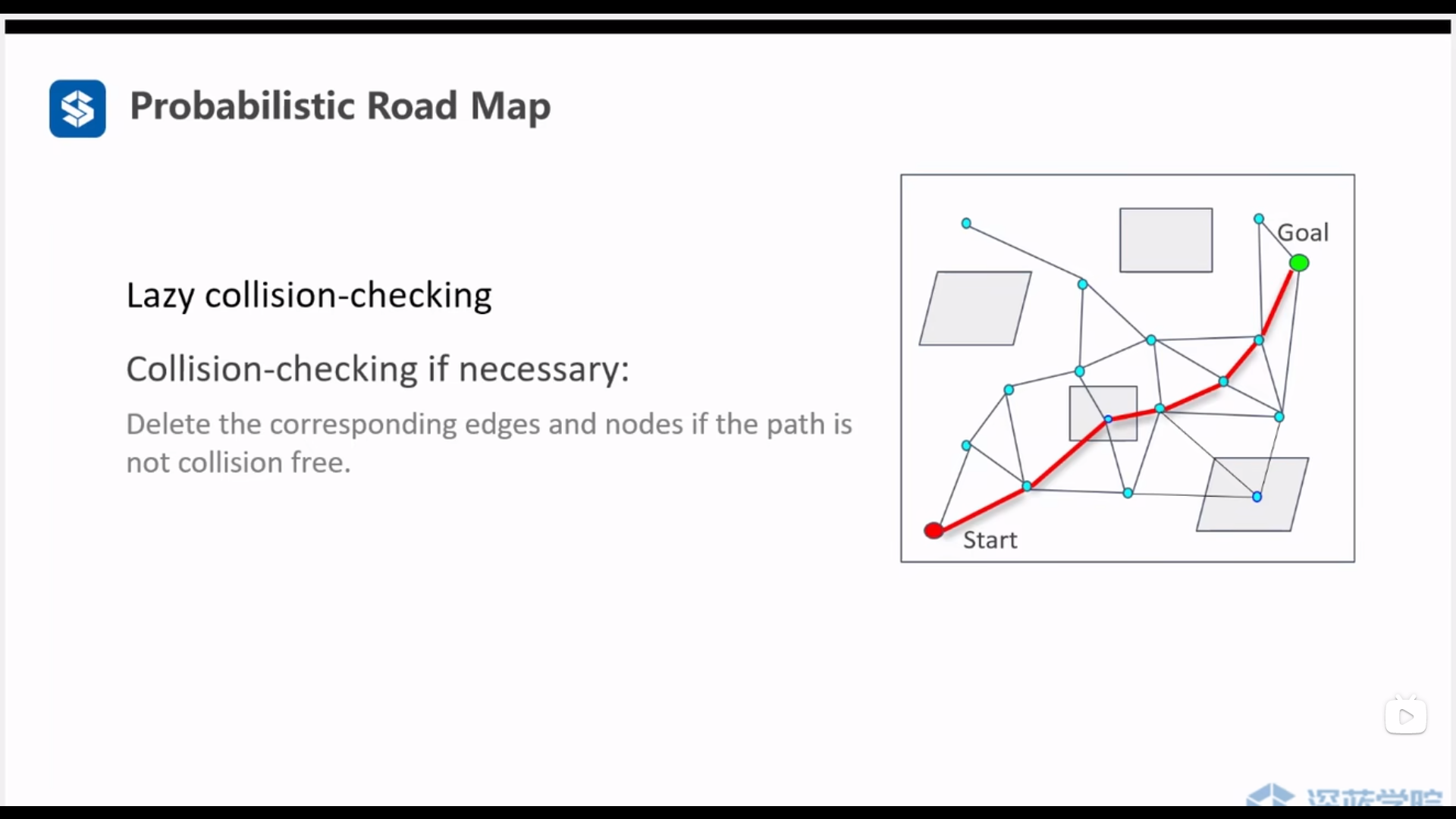
生成路径,然后检测路径上的边和点是否无障碍碰撞
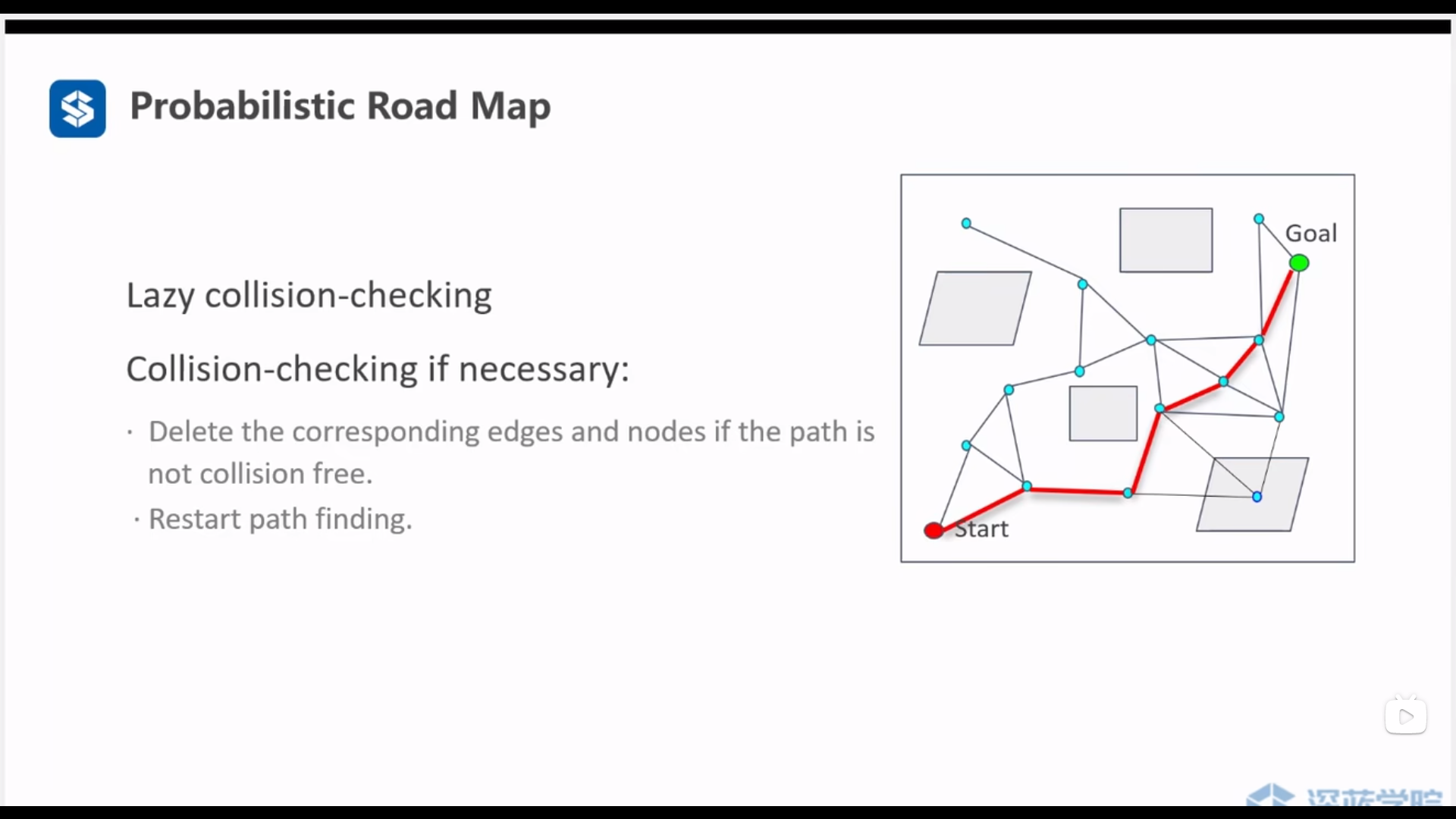
删除有碰撞的点和边,重新生成路径(相当于减少了不必要的障碍物检测)
Rapidly-exploring Radom Tree(快速搜索随机树)
增量式构建搜索树,终点加入搜索树时,就可以构建出一条路径
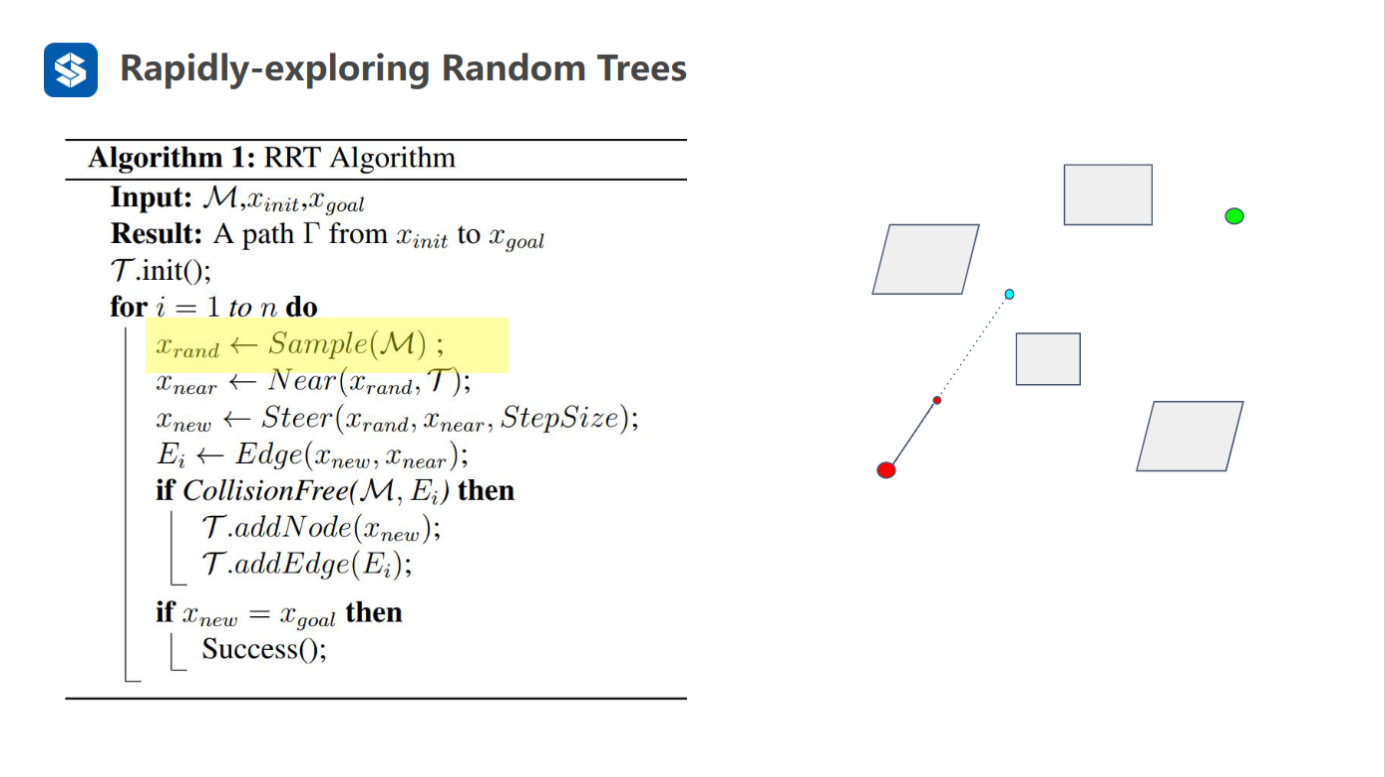
第一步:先随机采一个点A,连接起点O和点A,从起点O处向点A的方向移动一定距离,得到一个新的点B。如果起点O和点B连线没有障碍物,则点B连同线段OB加入到树中。
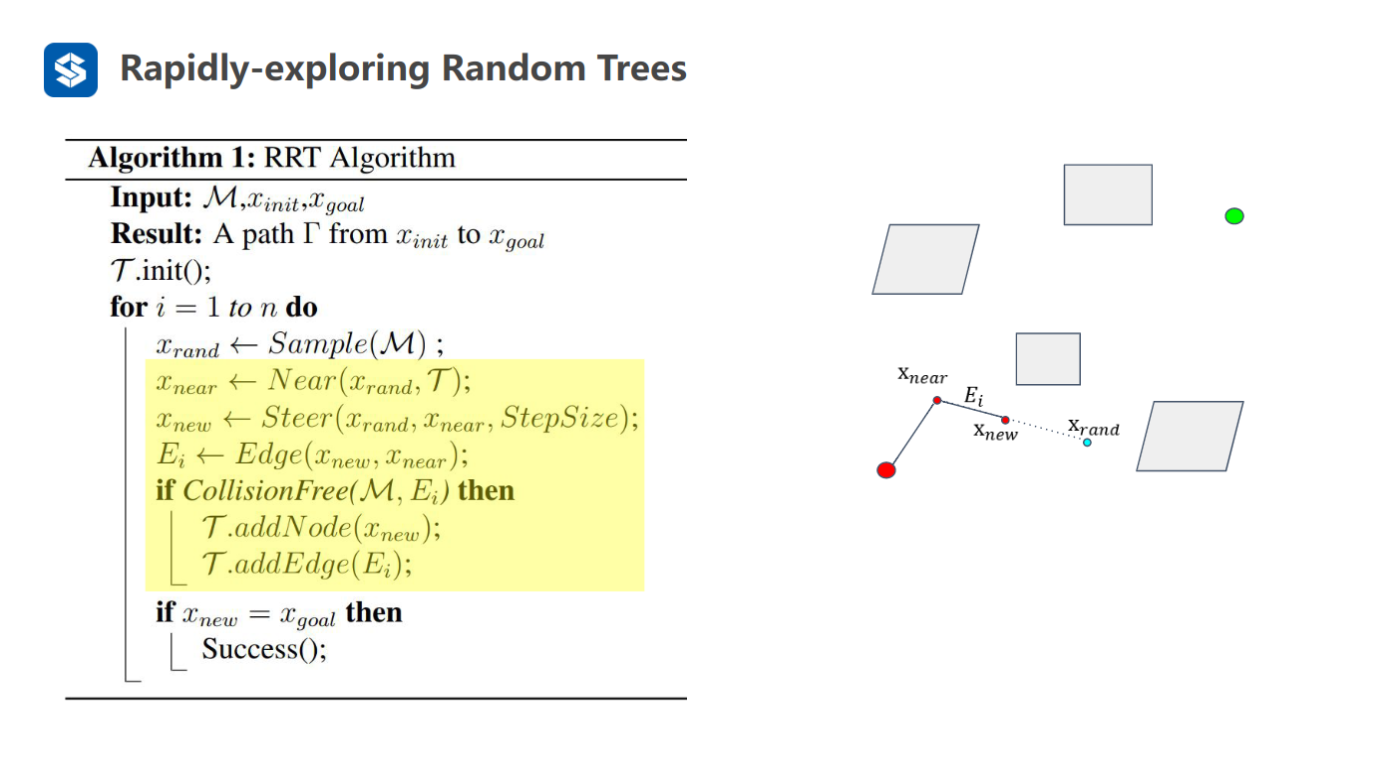
- 随机采样得到点
- 找到树中离点最近的点
- 从点向点移动一定距离,得到新的点,和点的连线
- 如果和没有与障碍物碰撞的话,将它们加入到树中
- 当拓展到终点或者其附近时,可以直接利用树的性质,得到路径(找父节点)
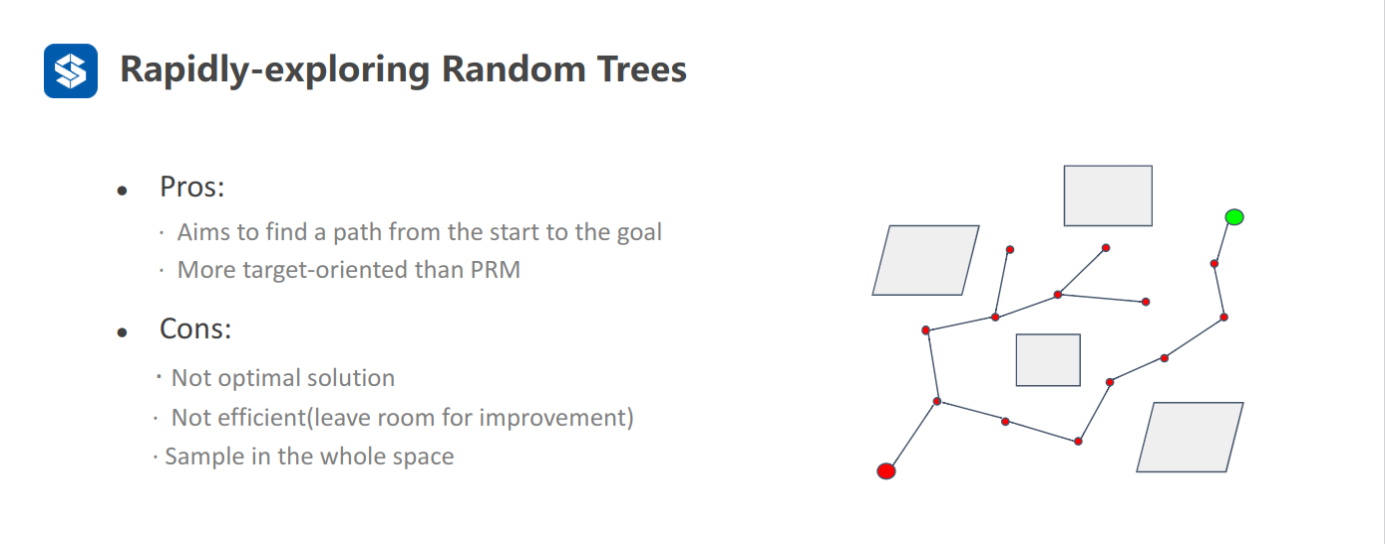
缺点:
-
不是最优路径
-
有改进空间。比如在狭窄的空间中,拓展速度较慢
改进RRT的几个核心函数,便可以改进RRT
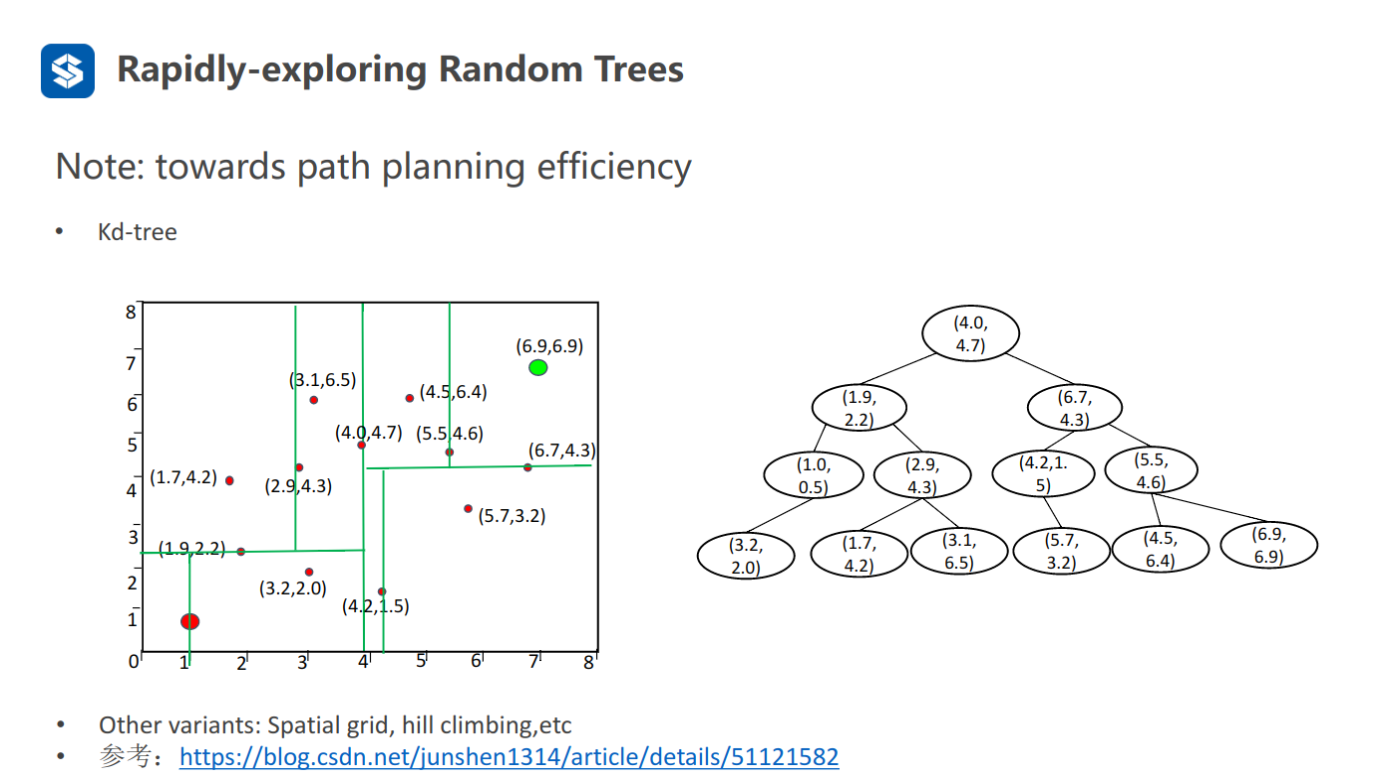
Kd-tree——改进Near( )函数
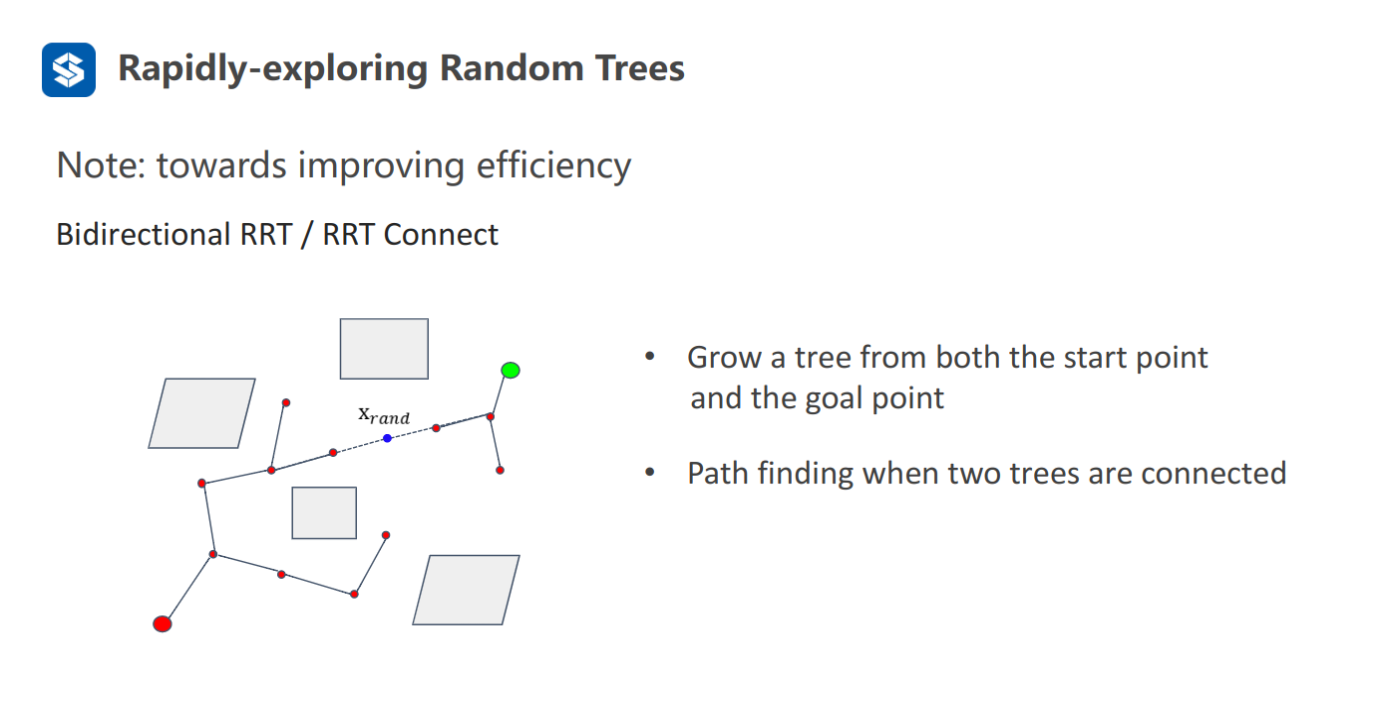
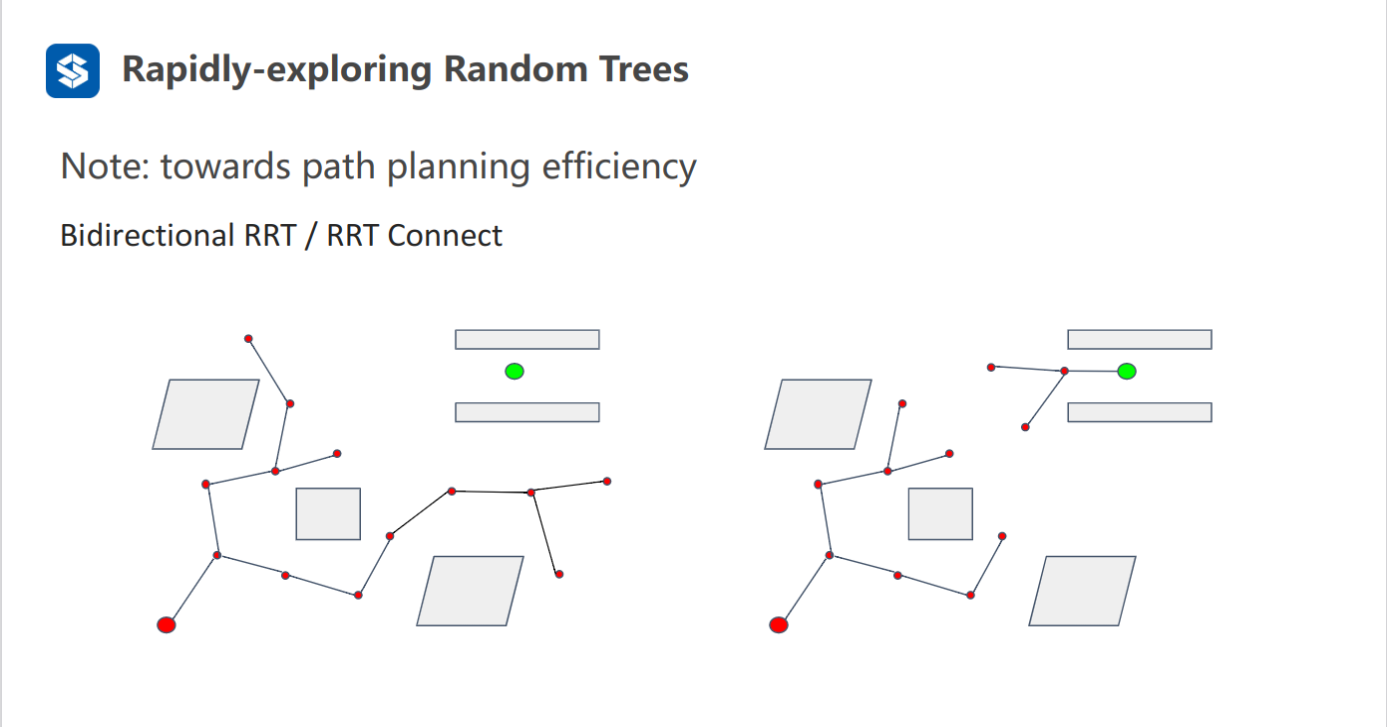
双向RRT(从起点和终点同时生成树),当两个树连接时就找到了路径
双向RRT可以解决一部分narrow passage的情况
Rapidly-exploring Random Tree*(保证了全局最优性)
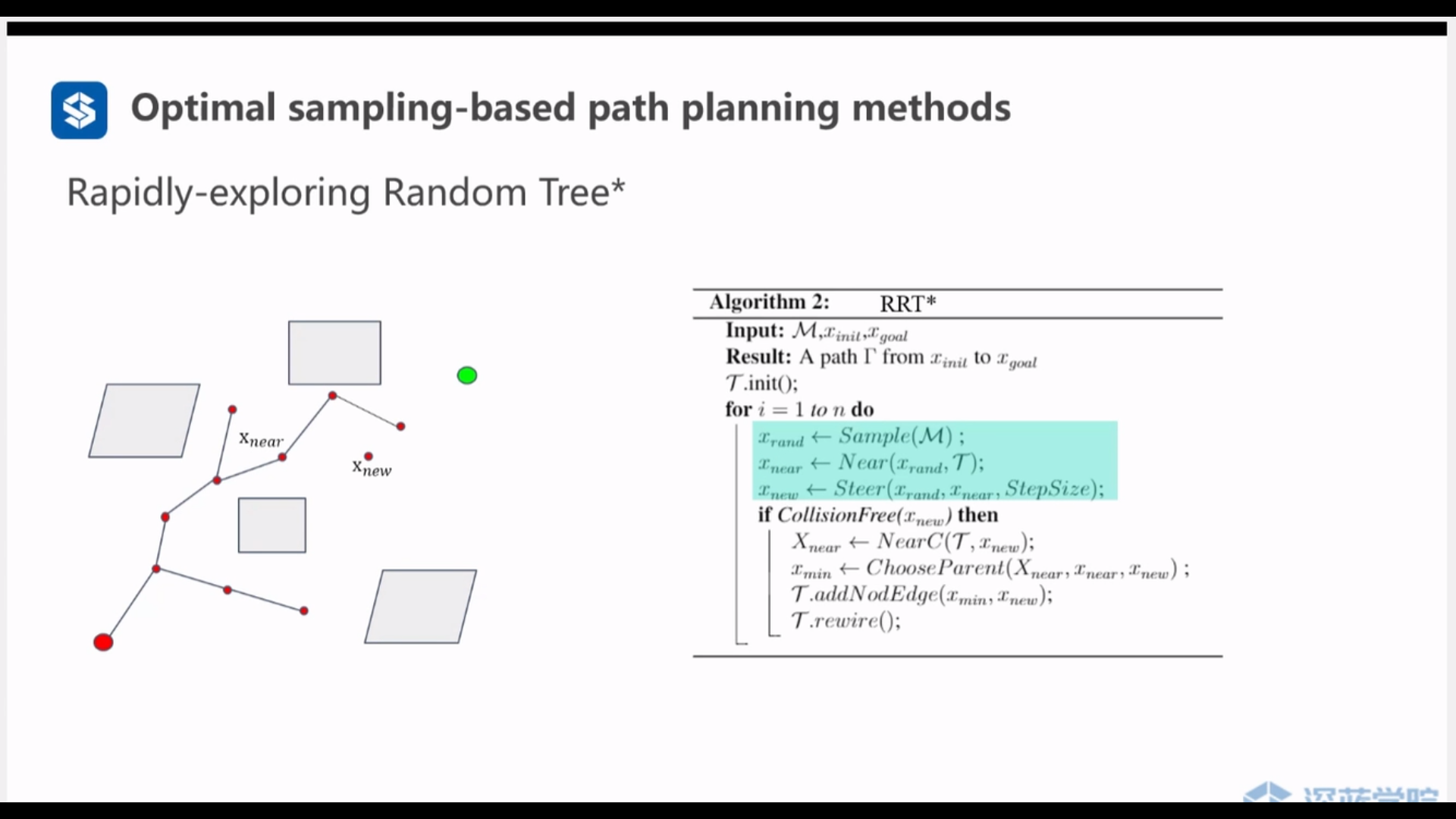
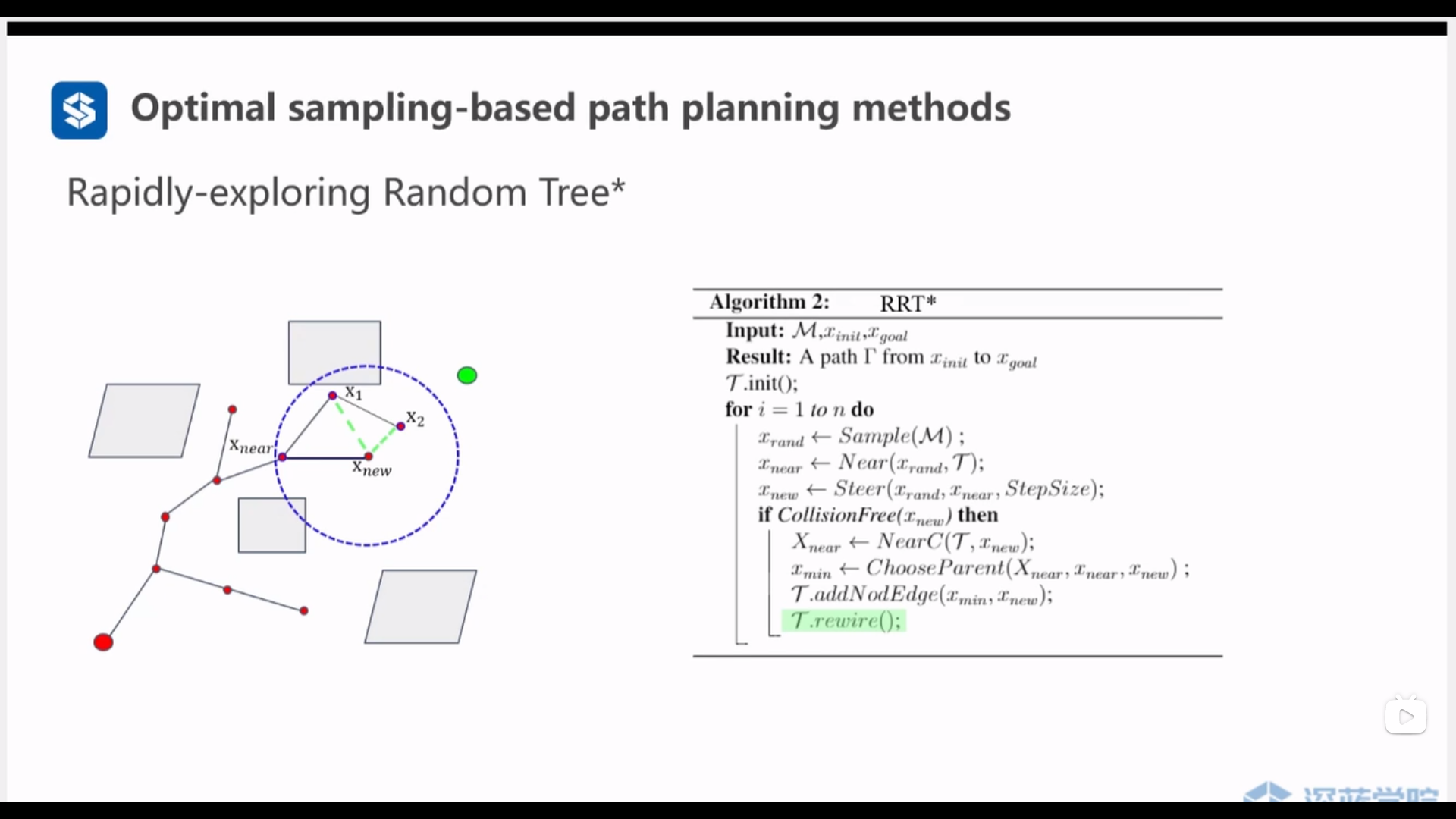
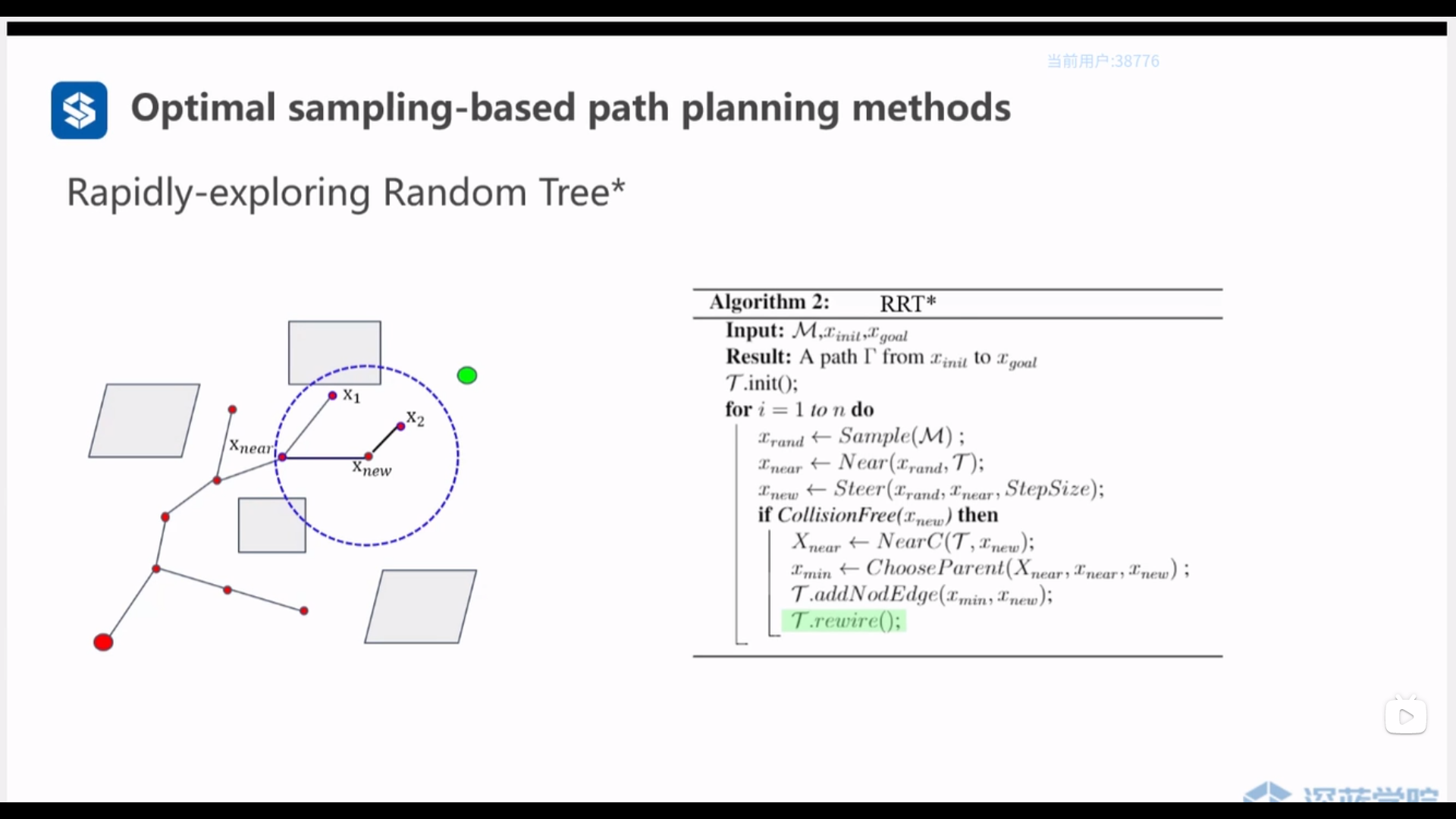
RRT*和RRT的不同之处在于:
-
当是时,RRT直接将添加到搜索树里
-
当是时,RRT*将进行一些处理,再把添加到搜索树中
-
采用一定的方式包络的邻域,得到处于邻域内的一些点()
-
选择了从起点到距离最近的路径,并将路径上的该点作为的父亲节点
-
将以及边添加进搜索树中
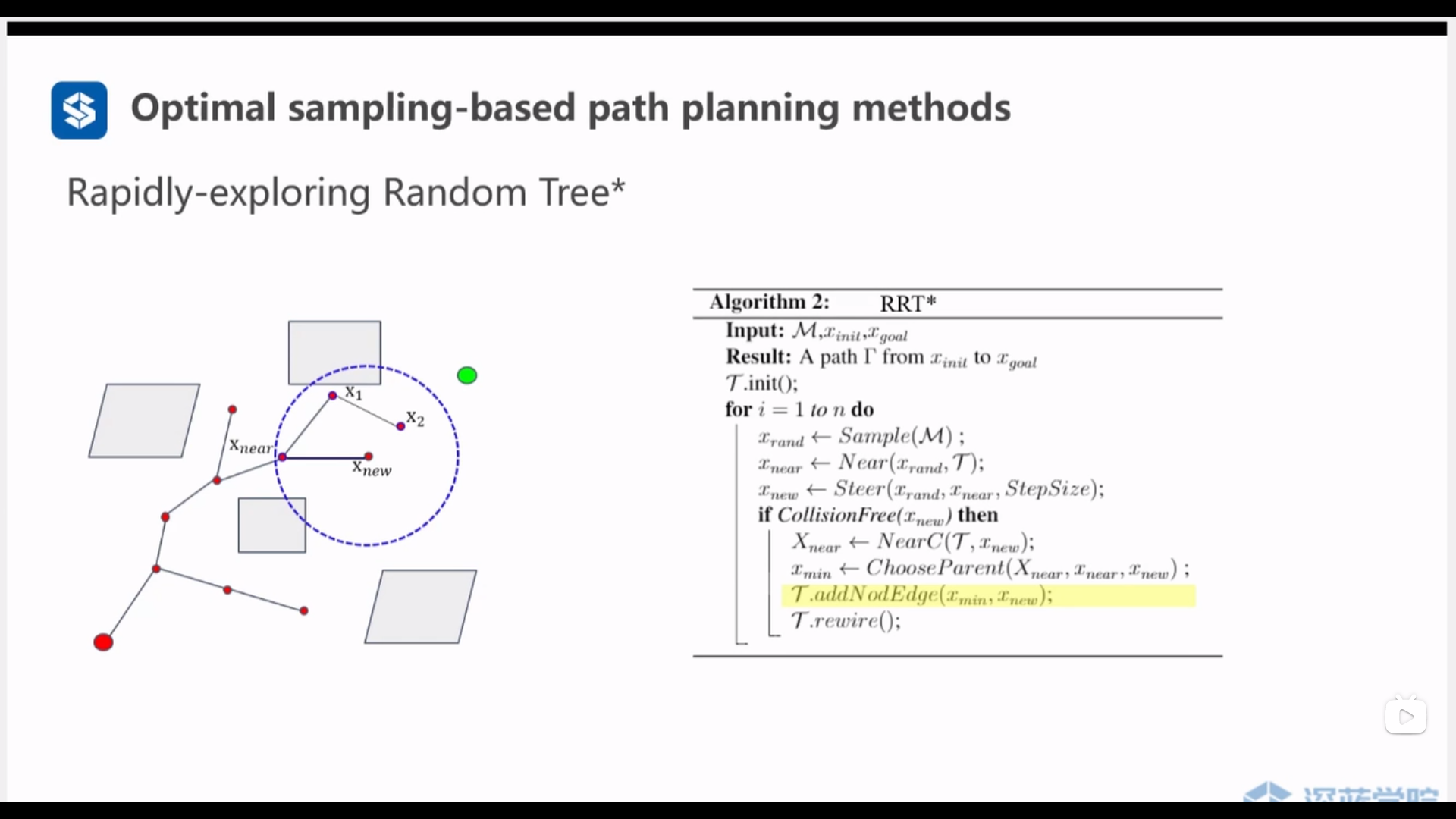
-
剪枝:修改搜索树的连接()
看能否通过走来减小邻域内其他节点的代价
-
RRT*在找到路径后,仍会不断进行剪枝的过程,优化路径
Kinodynamic-RRT*
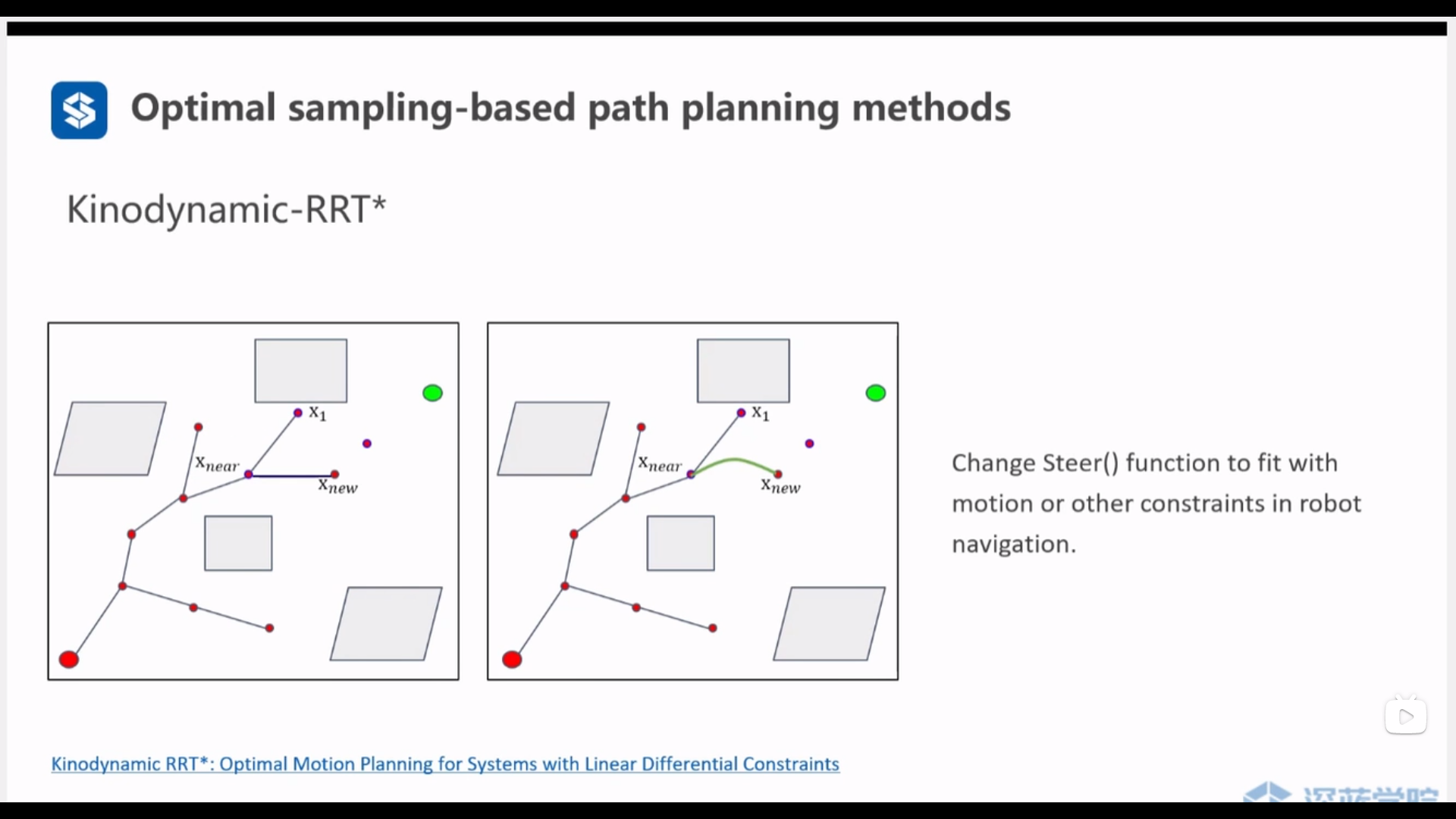
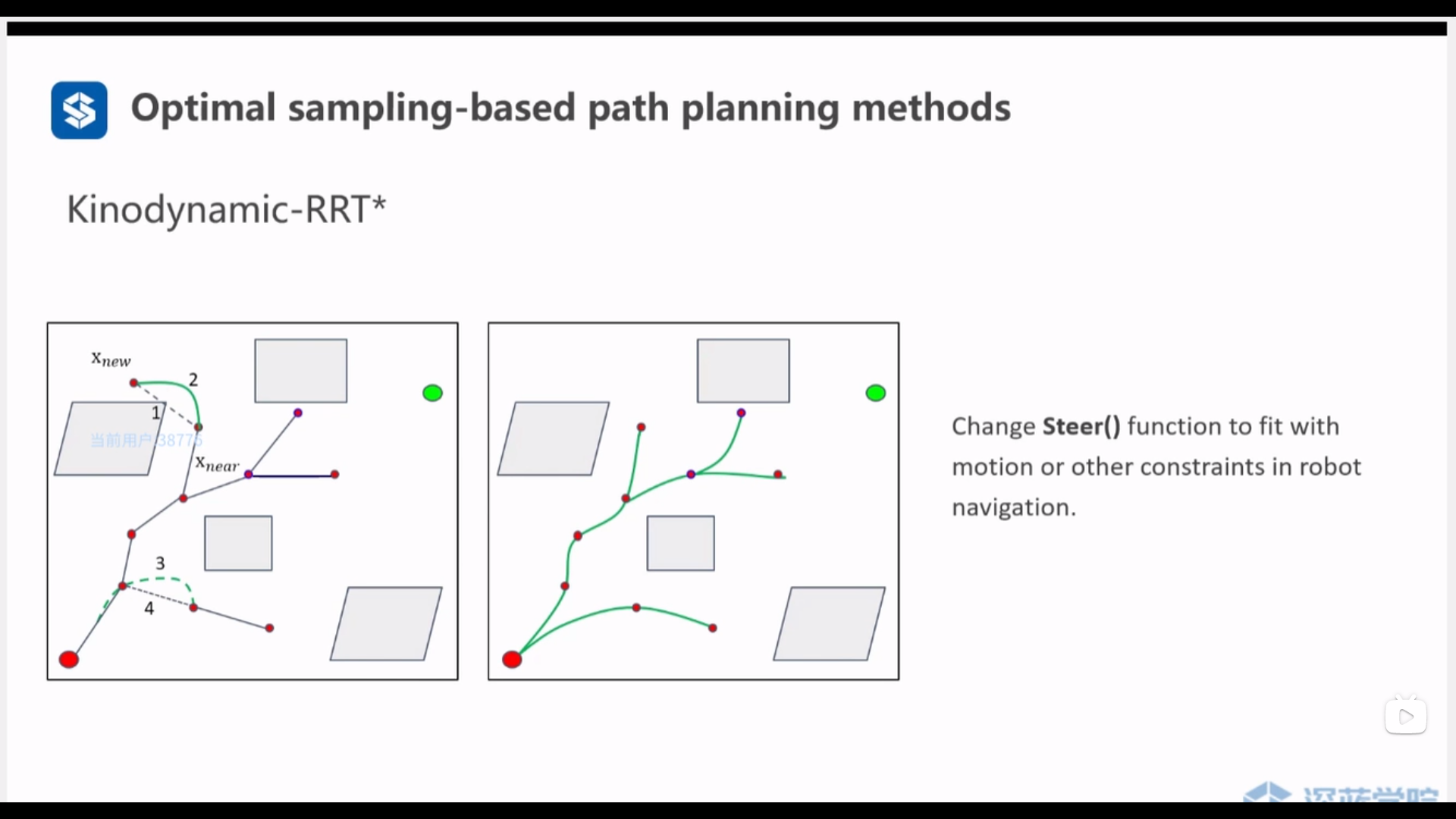
考虑机器人的动力学约束(改进Steer()函数)
Anytime RRT*
优化和改进的方法
Informed RRT*
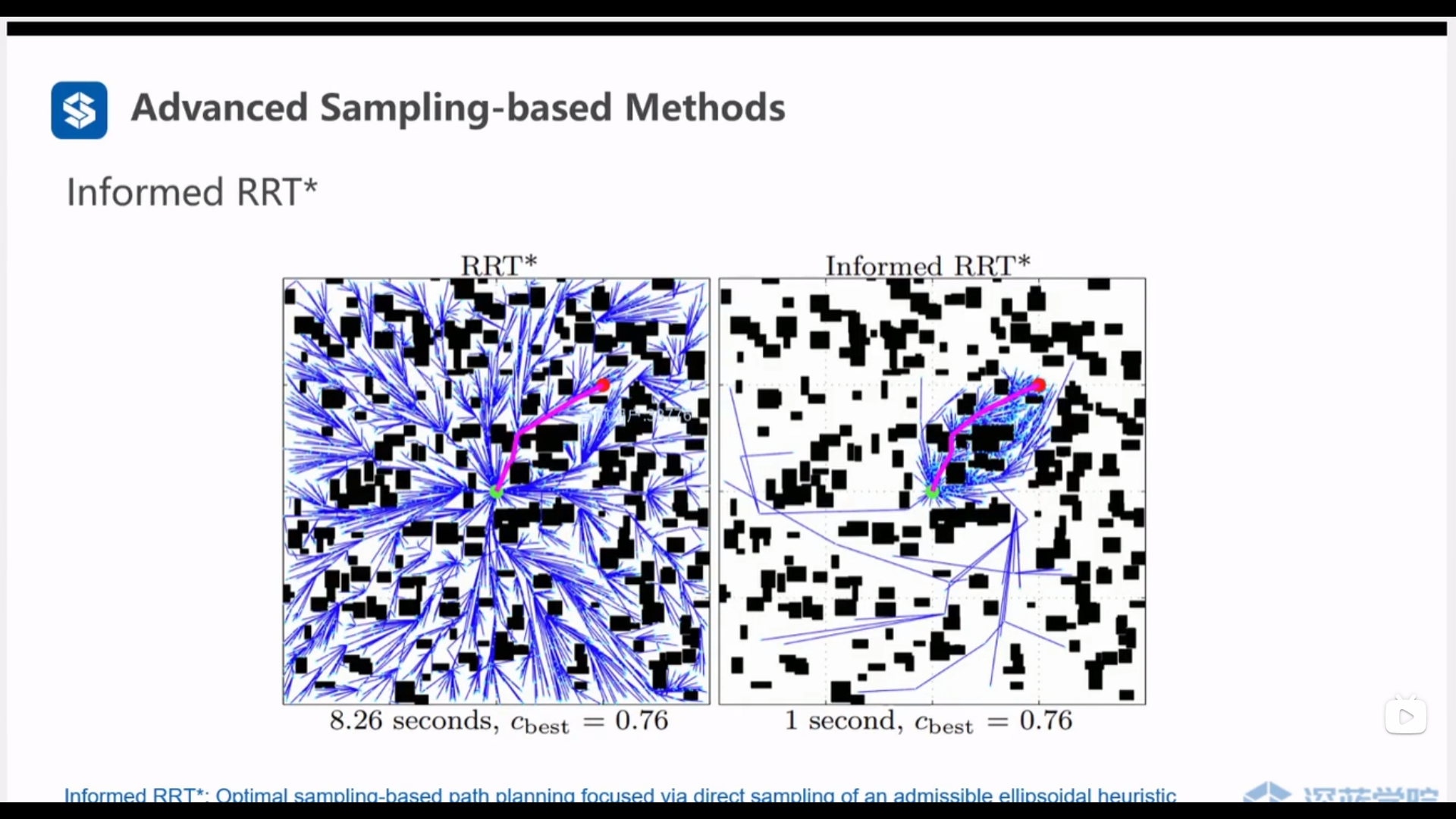
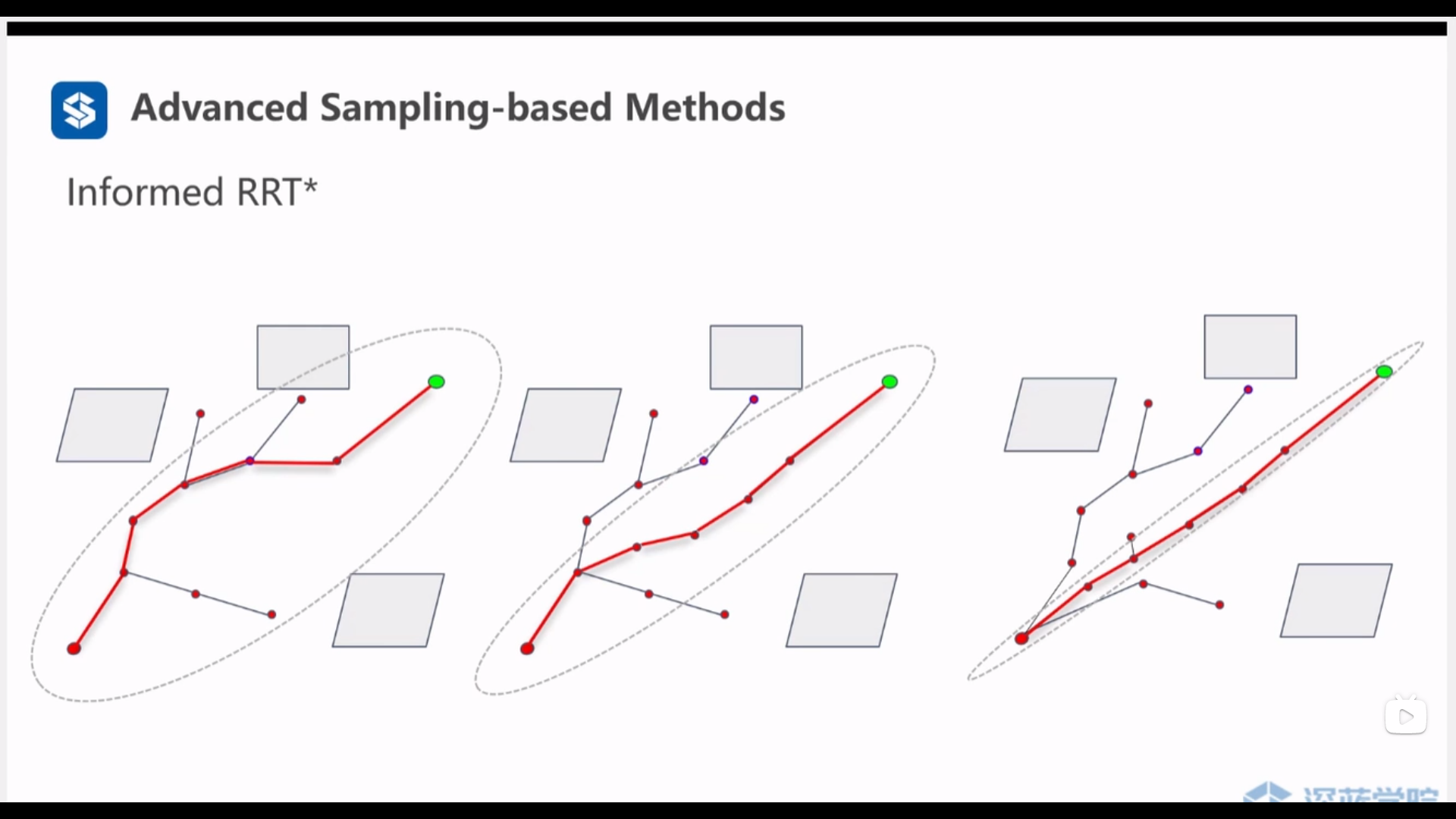
Informed RRT*将采样过程围绕在生成的路径的附近
- 路径生成部分(和RRT*一样)
- 当路径生成后,把采样范围限制在椭圆里面(把起点和终点作为椭圆的两个焦点,把路径的代价作为)
- 路径不断优化,采样范围进一步收缩。
Cross-entropy motion planning
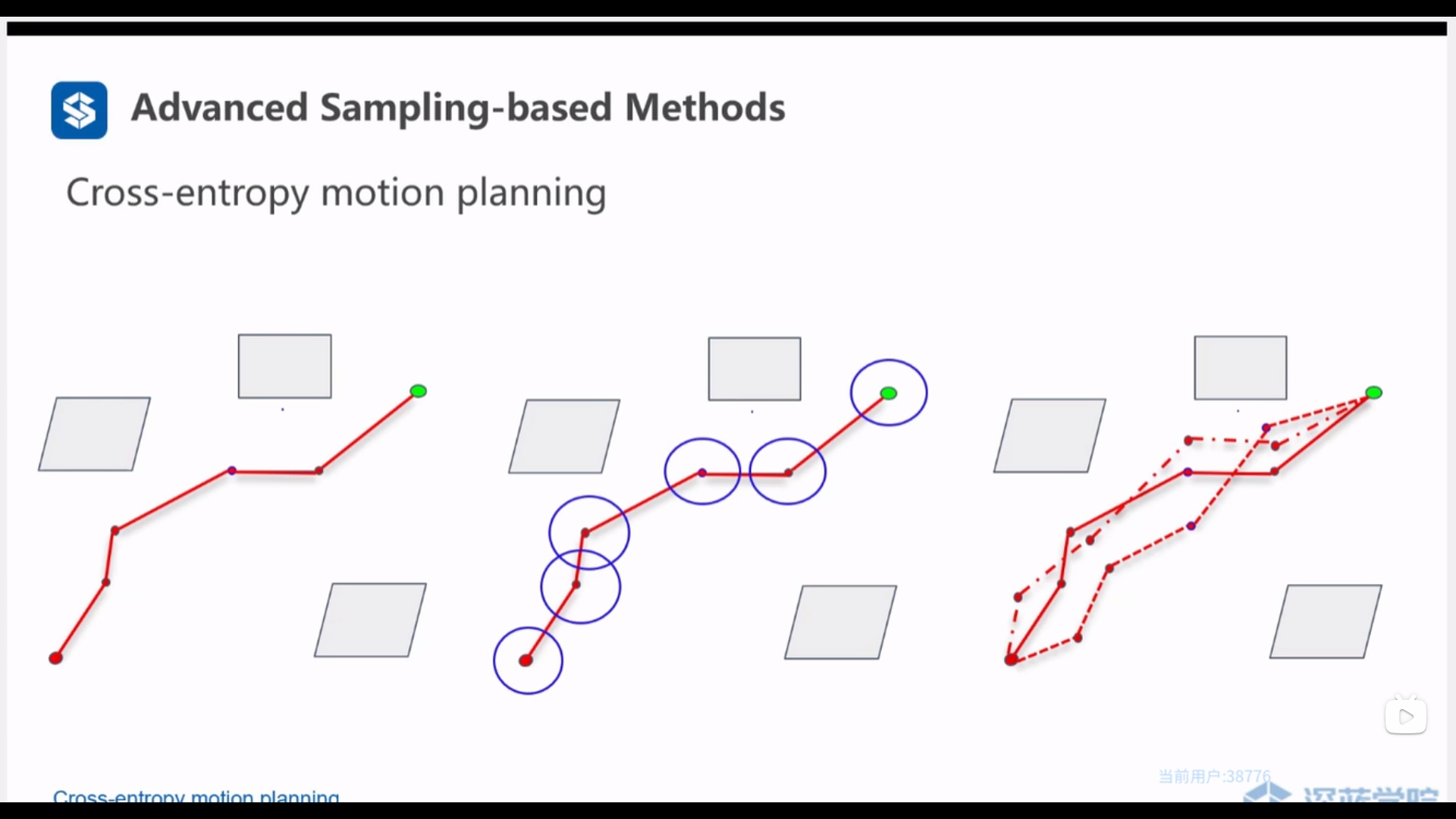
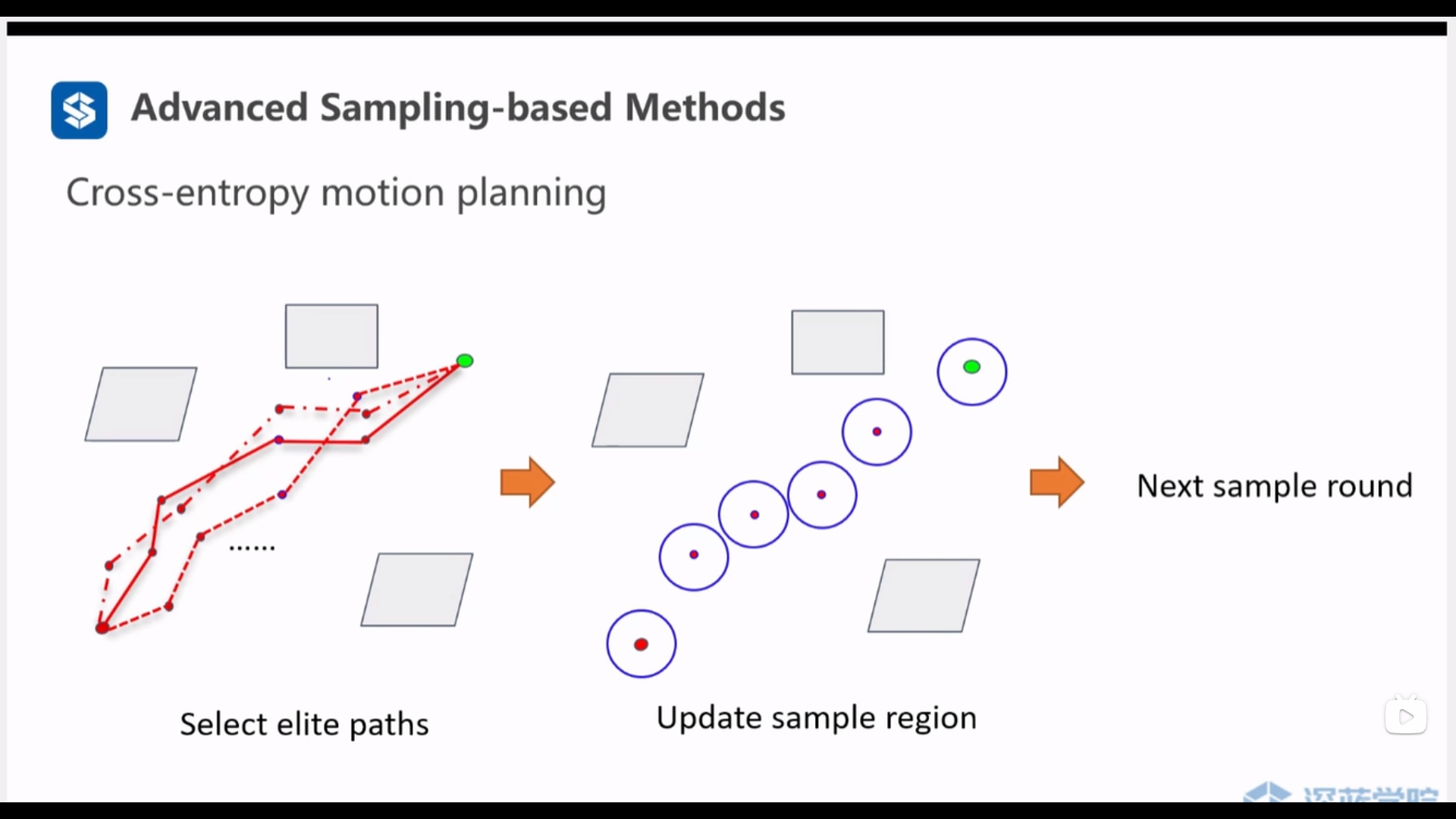
- 路径生成部分(和RRT*一样)
- 这些节点构成了一个多高斯模型,这个多高斯模型的每一部分都以节点为均值,指定的方差为方差(在每个圈内进行采样),得到几条新的路径
- 规定下一轮的采样空间:对多个轨迹的多个节点求均值,这些均值又构建出一个新的多高斯模型,重复上一步