
SUMMARY
学院派的规划流程
-
前端路径搜索(path finding)
寻找一个初始的、安全的路径低维的、离散的空间
-
基于搜索(search-based)的路径规划
- Dijkstra and A*
- Jump Point Search
-
基于随机采样(sampling-based)的路径规划
- 概率路线图(PRM)
- Rapidly-exploring Random Tree(RRT) and RRT*
-
满足动力学要求的路径规划
- State Lattice Search
- Kinodynamic RRT*(基于随机采样)
- Hybrid A*(基于搜索)
-
后端轨迹生成(trajectory gengeration)
寻找一个可执行的轨迹高维的、连续的空间
-
MINIMUM SNAP轨迹生成
-
具有硬约束和软约束的轨迹优化
ps:尖端的规划:端到端的导航算法(end to end),基于深度学习的导航算法(learning-based)
自主的移动机器人:感知-规划-控制
运动规划(motion planning)的基本要求
- 安全性
- 平滑性
- 动力学可行性

MDP(马尔可夫决策过程)&MPC(模型预测控制)
采用什么样的数据结构,采用什么融合算法
Map
有序地图
-
Occupancy grid map(占据栅格地图)
feature:
- Most Dense
- Structural
- Direct Index Query(直接的坐标索引)
-
Octo-map(八叉树地图)
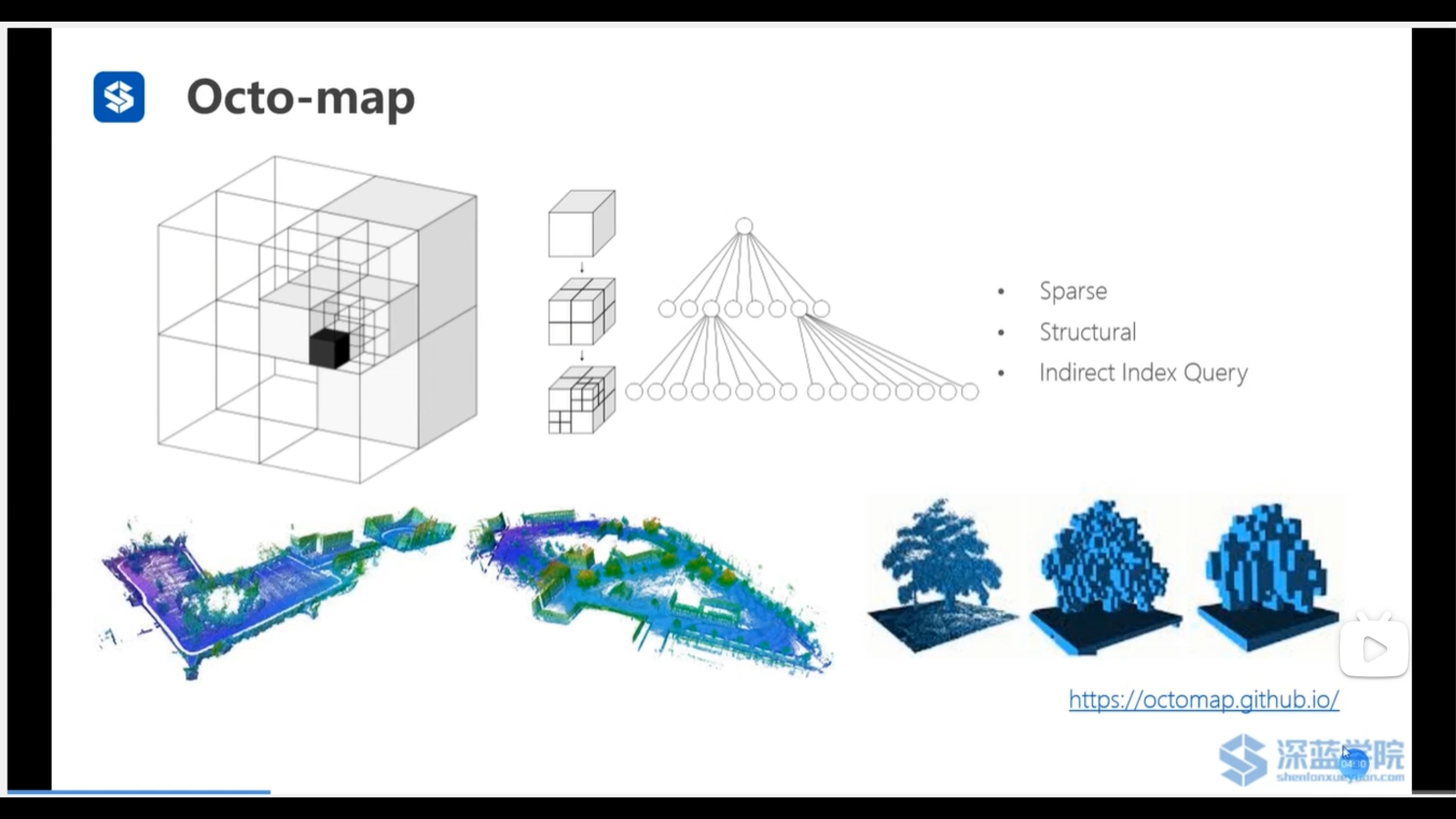
feature:
- Sparse(稀疏的)
- Structural
- Indirect Index Query(非直接的坐标索引)
-
Voxel(三维像素) hashing
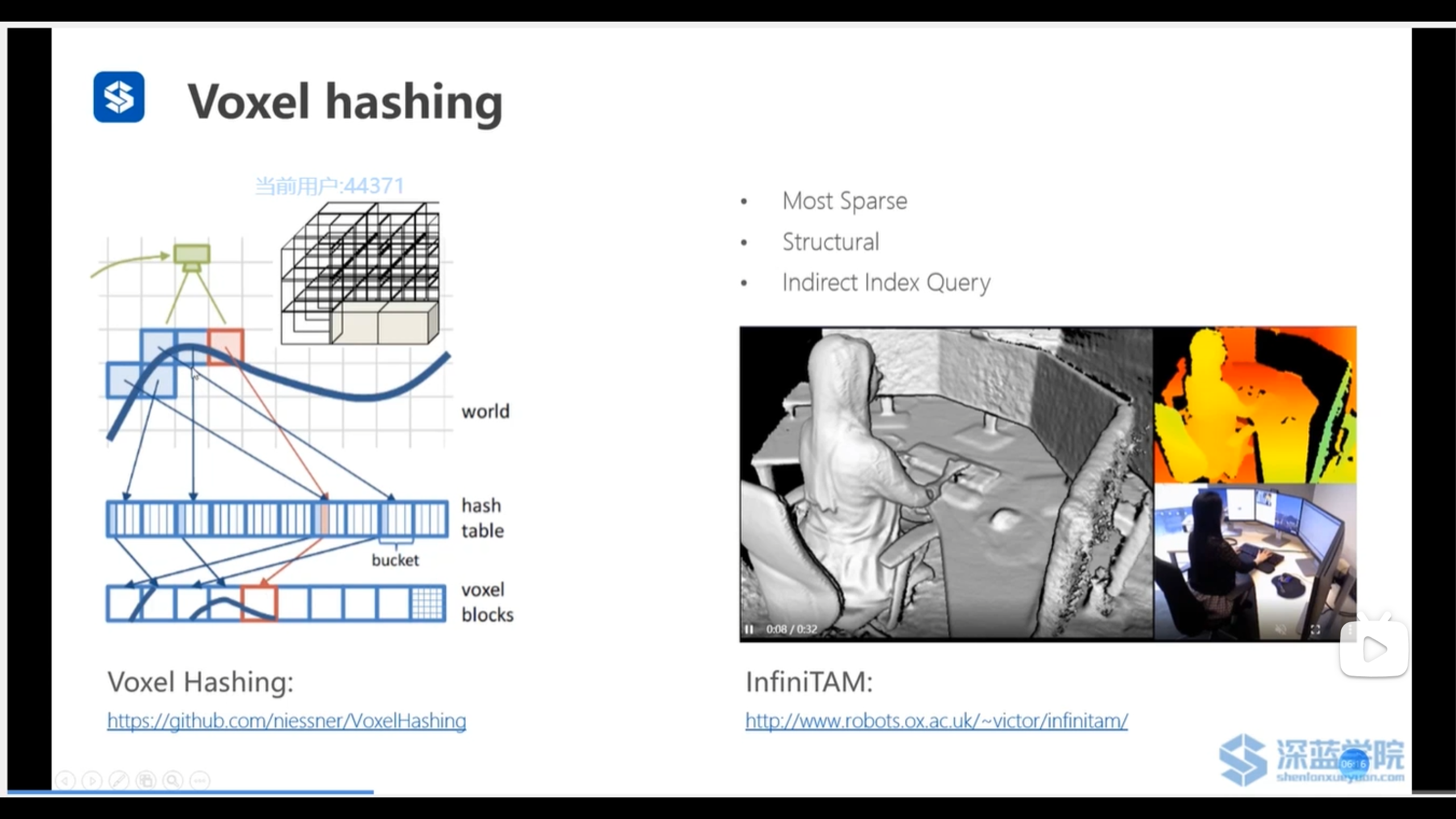
值得一提的是,这里存储是将多个voxel信息存在一个block里,再将block存入Hash表中
无序的地图
-
Point cloud map
feature:
- Un-ordered
- No Index Query
-
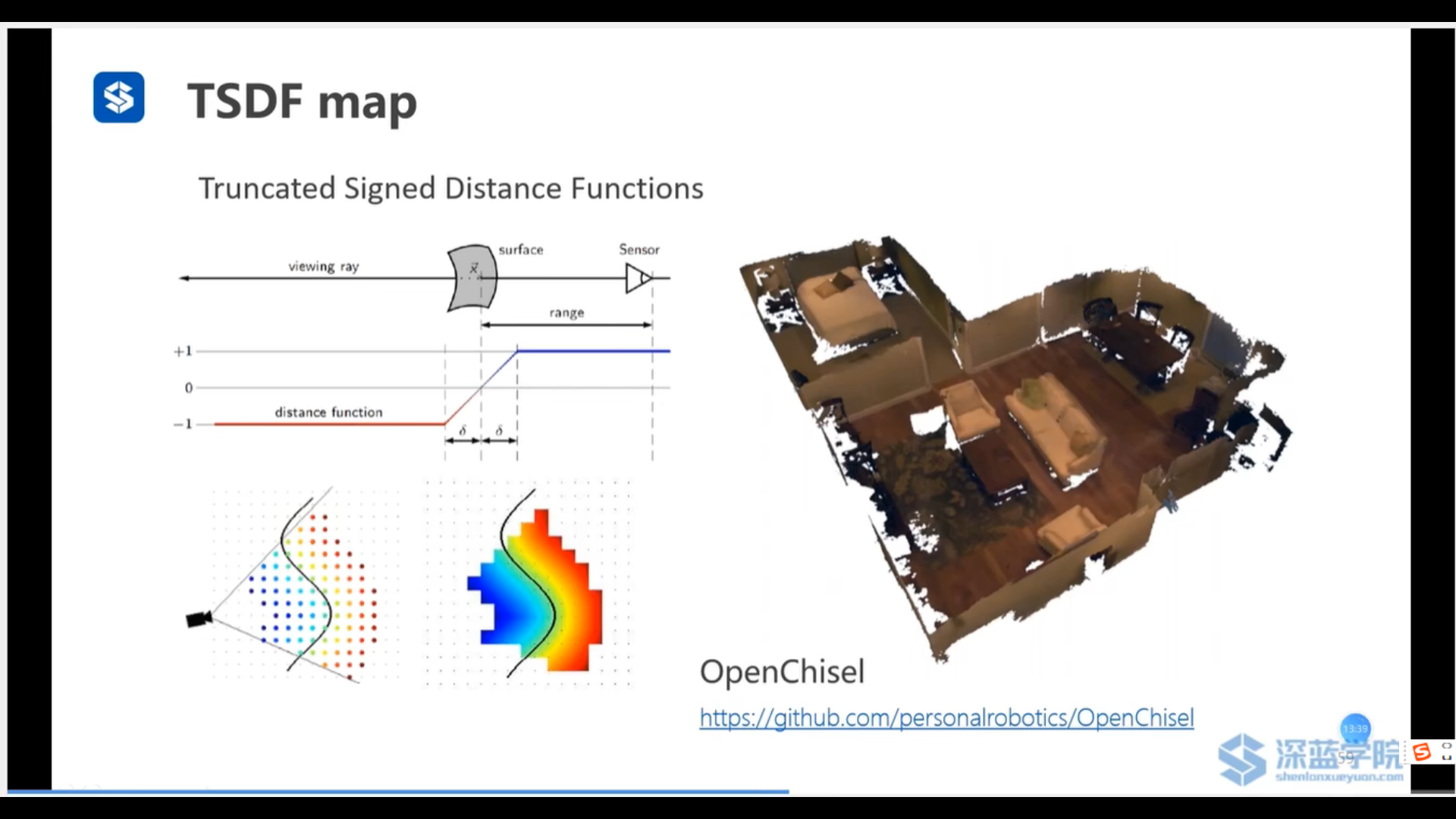
TSDF map
Truncated(截断的) Signed Distance Functions
截断体现只关心和维护局部的障碍物信息(可以得到离障碍物远近的梯度信息)
-
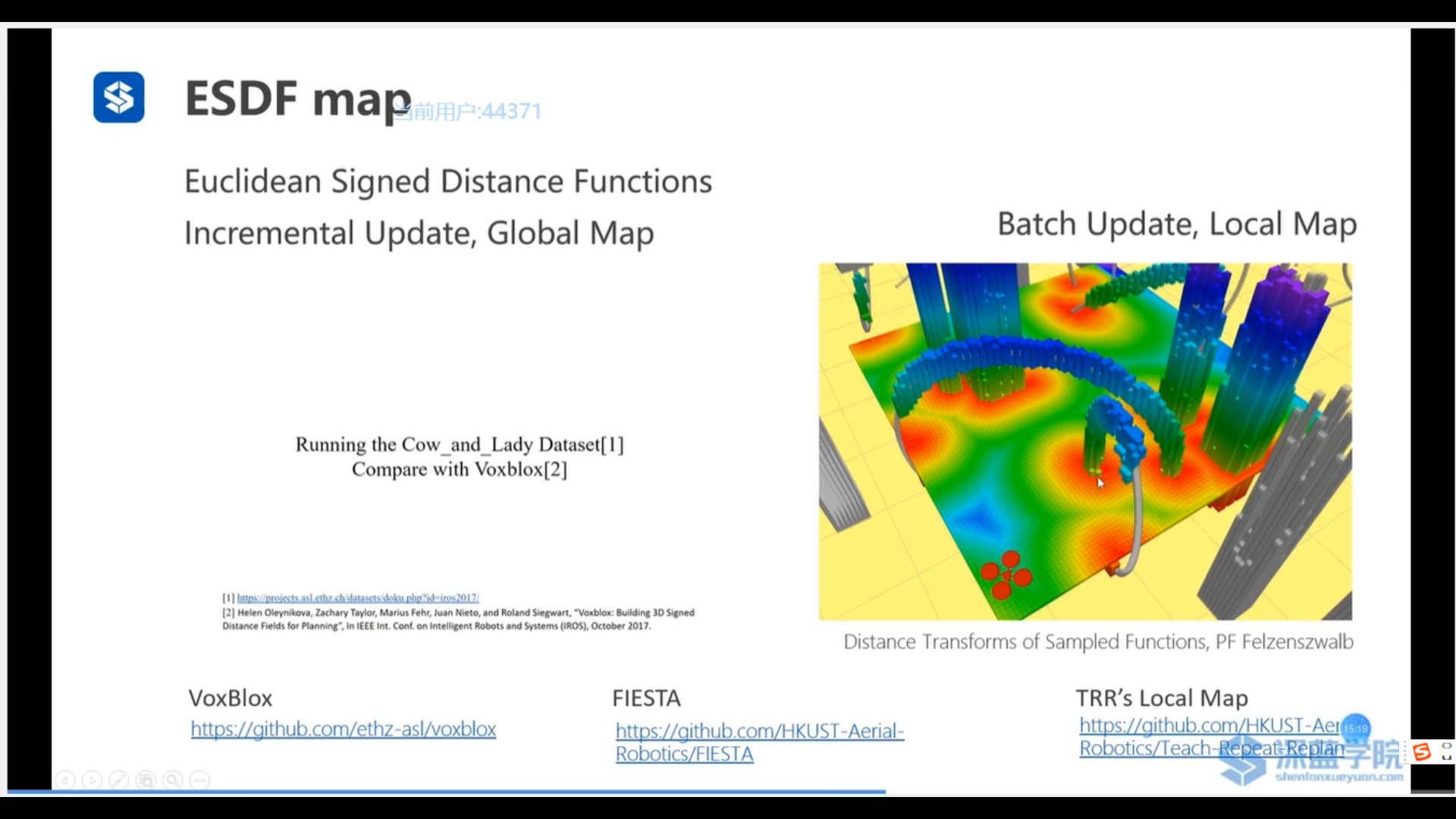
ESDF map
Euclidean(欧几里何的)
ESDF地图是增量式更新的、全局的地图
More
- Free_space Roadmap
- Voronoi Diagram Map(拓扑地图)